Class definition for creating a Corobot controller object. More...
#include <Corobot.h>
Public Member Functions | |
| CorobotC () | |
| Construct a Corobot object. | |
| void | init () |
| Initialize Corobot. | |
| void | setLeftMotor (Direction dir, uint8_t speed) const |
| Set power and direction for the left motor. | |
| void | setRightMotor (Direction dir, uint8_t speed) const |
| Set power and direction for the right motor. | |
| void | setMotors (Direction dir_l, uint8_t speed_l, Direction dir_r, uint8_t speed_r) |
| Set powers and directions for both motors. | |
| void | calibrateMotors (uint8_t leftMotorPercent, uint8_t rightMotorPercent) |
| Calibrate motors. | |
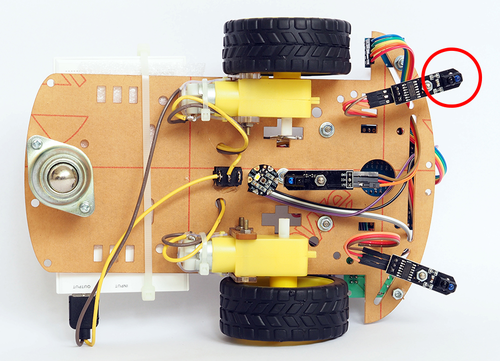
| bool | getLeftEye () const |
| Check whether the left eye (the left line tracker) is seeing non-black color. | |
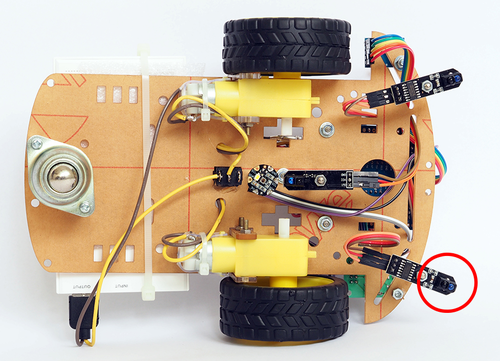
| bool | getRightEye () const |
| Check whether the right eye (the right line tracker) is seeing non-black color. | |
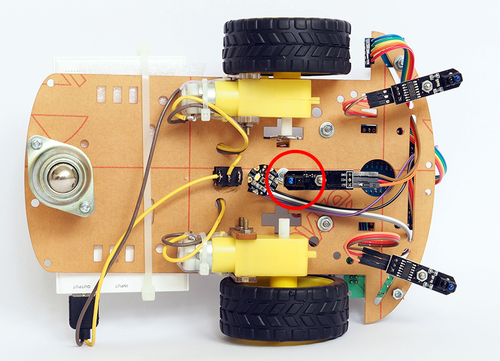
| bool | getCenterEye () const |
| Check whether the center eye (the center line tracker) is seeing non-black color. | |
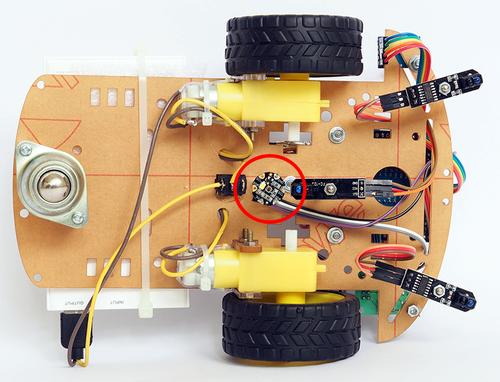
| Color | getColor () |
| Return the current color. | |
| const char * | getColorName (Color c) const |
| Translate the given color code into a textual name. | |
| void | getRawColor (uint16_t *rr, uint16_t *rg, uint16_t *rb, uint16_t *rc) |
| Get raw color readings from the color sensor. | |
| Color | getColor (uint16_t rr, uint16_t rg, uint16_t rb, uint16_t rc) const |
| Estimate the color from the given raw values. | |
| void | calibrateColor (uint16_t black_r, uint16_t black_g, uint16_t black_b, uint16_t black_c, uint16_t white_r, uint16_t white_g, uint16_t white_b, uint16_t white_c, uint16_t red_r, uint16_t red_g, uint16_t red_b, uint16_t red_c, uint16_t green_r, uint16_t green_g, uint16_t green_b, uint16_t green_c, uint16_t blue_r, uint16_t blue_g, uint16_t blue_b, uint16_t blue_c, uint16_t yellow_r, uint16_t yellow_g, uint16_t yellow_b, uint16_t yellow_c, uint16_t magenta_r, uint16_t magenta_g, uint16_t magenta_b, uint16_t magenta_c) |
| Calibrate the color sensor. | |
| int8_t | getPitch () const |
| Return the current rotation angle of the Corobot along the pitch axis. | |
| int8_t | getRoll () const |
| Return the current rotation angle of the Corobot along the roll axis. | |
| void | getRawAccel (uint16_t *ax, uint16_t *ay, uint16_t *az) |
| Obtain the raw accelerometer's readings. | |
| int8_t | getPitch (uint16_t ax, uint16_t ay, uint16_t az) const |
| Calculate the rotation angle of the Corobot along the pitch axis using the specified raw acceleration values. | |
| int8_t | getRoll (uint16_t ax, uint16_t ay, uint16_t az) const |
| Calculate the rotation angle of the Corobot along the roll axis using the specified raw acceleration values. | |
| void | calibrateAccel () |
| Calibrate the accelerometer as "leveled" using the current readings. | |
| void | calibrateAccel (uint16_t ax, uint16_t ay, uint16_t az) |
| Calibrate the accelerometer as "leveled" using the specified acceleration values. | |
| void | setLed (Color c, bool state) |
| Set the state of the specified LED on the basic I/O board. | |
| void | setLedValue (uint8_t value) |
| Set the LEDs on the basic I/O board to represent the binary of the specified value. | |
| void | setRightLed (bool state) |
| Set the state of the right LED (the green TX LED) on the controller board. | |
| void | setLeftLed (bool state) |
| Set the state of the left LED (the yellow RX LED) on the controller board. | |
| bool | switchPressed () const |
| Check whether the switch on the basic I/O board is currently pressed. | |
| void | waitSwitchPress () const |
| Wait until the switch on the basic I/O board is pressed. | |
| void | waitSwitchRelease () const |
| Wait until the switch on the basic I/O board is released. | |
| void | waitRemote () const |
| Wait until the remote Corobot is connected via Bluetooth. | |
Public Attributes | |
| HardwareSerial & | remote = Serial1 |
| Serial object reference for communicating with the remote Corobot via Bluetooth. | |
Detailed Description
Class definition for creating a Corobot controller object.
Member Function Documentation
| void CorobotC::setLeftMotor | ( | Direction | dir, |
| uint8_t | power | ||
| ) | const |
Set power and direction for the left motor.
- Parameters:
-
dir FORWARD|BACKWARD Direction of the left motor power 0-100 Power of the left motor
If calibrateMotors() has been used,the actual power of the motor will be adjusted by the previously specified power percentage.
| void CorobotC::setRightMotor | ( | Direction | dir, |
| uint8_t | power | ||
| ) | const |
Set power and direction for the right motor.
- Parameters:
-
dir FORWARD|BACKWARD Direction of the right motor power 0-100 Power of the right motor
If calibrateMotors() has been used,the actual power of the motor will be adjusted by the previously specified power percentage.
| void CorobotC::setMotors | ( | Direction | dir_l, |
| uint8_t | power_l, | ||
| Direction | dir_r, | ||
| uint8_t | power_r | ||
| ) |
Set powers and directions for both motors.
If calibrateMotors() has been previously called, the actual power of each motor will be normalized by the corresponding power percentage.
- Parameters:
-
dir_l FORWARD|BACKWARD Direction of the left motor dir_r FORWARD|BACKWARD Direction of the right motor power_l 0-100 Power of the left motor power_r 0-100 Power of the right motor
| void CorobotC::calibrateMotors | ( | uint8_t | leftMotorPercent, |
| uint8_t | rightMotorPercent | ||
| ) |
Calibrate motors.
The power percentages will be used to adjust the actual motors' powers when calling setLeftMotor(), setRightMotor(), and setMotors()
- Parameters:
-
leftMotorPercent Power percentage adjustment to be applied to the left motor rightMotorPercent Power percentage adjustment to be applied to the right motor
| bool CorobotC::getLeftEye | ( | ) | const |
Check whether the left eye (the left line tracker) is seeing non-black color.
- Return values:
-
true the left eye is on top of a non-black color floor false the left eye is on top of a black floor
| bool CorobotC::getRightEye | ( | ) | const |
Check whether the right eye (the right line tracker) is seeing non-black color.
- Return values:
-
true the right eye is on top of a non-black color floor false the right eye is on top of a black floor
| bool CorobotC::getCenterEye | ( | ) | const |
Check whether the center eye (the center line tracker) is seeing non-black color.
- Return values:
-
true the center eye is on top of a non-black color floor false the center eye is on top of a black floor
Return the current color.
Color recognition is done by comparing the current raw color readings with the calibrated values indicated by the most recent call to calibrateColor(). The closest color is returned.
- Returns:
- Color code representing the recognized color on the floor.
| const char * CorobotC::getColorName | ( | Color | c | ) | const |
Translate the given color code into a textual name.
- Parameters:
-
c Color code
- Returns:
- String containing the corresponding textual color name
| void CorobotC::getRawColor | ( | uint16_t * | r, |
| uint16_t * | g, | ||
| uint16_t * | b, | ||
| uint16_t * | c | ||
| ) |
Get raw color readings from the color sensor.
- Parameters:
-
r Pointer to 16-bit unsigned integer to store raw red intensity reading g Pointer to 16-bit unsigned integer to store raw green intensity reading b Pointer to 16-bit unsigned integer to store raw blue intensity reading c Pointer to 16-bit unsigned integer to store raw clear intensity reading
| Color CorobotC::getColor | ( | uint16_t | rr, |
| uint16_t | rg, | ||
| uint16_t | rb, | ||
| uint16_t | rc | ||
| ) | const |
Estimate the color from the given raw values.
- Parameters:
-
rr Raw red intensity value rg Raw green intensity value rb Raw blue intensity value rc Raw clear intensity value
- Returns:
- Corresponding color code recognized from the specified raw values
| void CorobotC::calibrateColor | ( | uint16_t | black_r, |
| uint16_t | black_g, | ||
| uint16_t | black_b, | ||
| uint16_t | black_c, | ||
| uint16_t | white_r, | ||
| uint16_t | white_g, | ||
| uint16_t | white_b, | ||
| uint16_t | white_c, | ||
| uint16_t | red_r, | ||
| uint16_t | red_g, | ||
| uint16_t | red_b, | ||
| uint16_t | red_c, | ||
| uint16_t | green_r, | ||
| uint16_t | green_g, | ||
| uint16_t | green_b, | ||
| uint16_t | green_c, | ||
| uint16_t | blue_r, | ||
| uint16_t | blue_g, | ||
| uint16_t | blue_b, | ||
| uint16_t | blue_c, | ||
| uint16_t | yellow_r, | ||
| uint16_t | yellow_g, | ||
| uint16_t | yellow_b, | ||
| uint16_t | yellow_c, | ||
| uint16_t | magenta_r, | ||
| uint16_t | magenta_g, | ||
| uint16_t | magenta_b, | ||
| uint16_t | magenta_c | ||
| ) |
Calibrate the color sensor.
These values will be used by the getColor() method for computing closest matching color.
- Parameters:
-
black_r,black_g,black_b,black_c Raw color sensor readings when the sensor is on black color white_r,white_g,white_b,white_c Raw color sensor readings when the sensor is on white color red_r,red_g,red_b,red_c Raw color sensor readings when the sensor is on red color green_r,green_g,green_b,green_c Raw color sensor readings when the sensor is on green color blue_r,blue_g,blue_b,blue_c Raw color sensor readings when the sensor is on blue color yellow_r,yellow_g,yellow_b,yellow_c Raw color sensor readings when the sensor is on yellow color magenta_r,magenta_g,magenta_b,magenta_c Raw color sensor readings when the sensor is on magenta color
| int8_t CorobotC::getPitch | ( | ) | const |
Return the current rotation angle of the Corobot along the pitch axis.
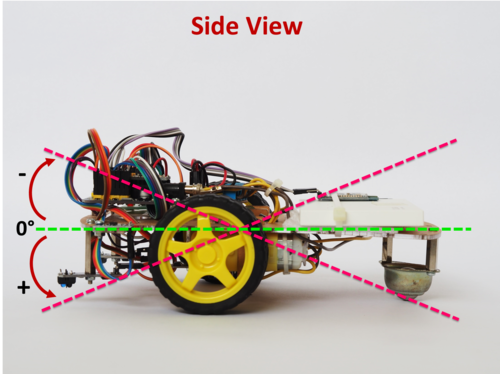
- Returns:
- Pitch angle in degrees between -20 and 20
- Return values:
-
0 The Corobot is leveled with respect to the pitch axis >0 The Corobot's nose is pointing downward <0 The Corobot's nose is pointing upward
| int8_t CorobotC::getRoll | ( | ) | const |
Return the current rotation angle of the Corobot along the roll axis.
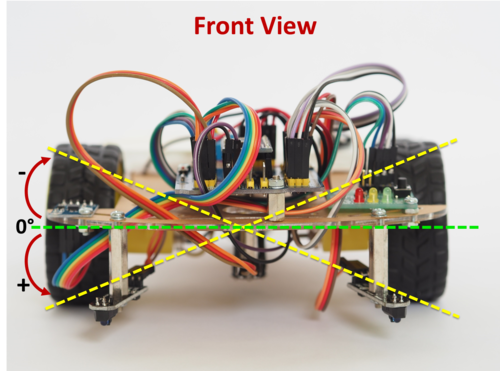
- Returns:
- Roll angle in degrees between -20 and 20
- Return values:
-
0 The Corobot is leveled with respect to the roll axis >0 The Corobot is banking right <0 The Corobot is banking left
| void CorobotC::getRawAccel | ( | uint16_t * | ax, |
| uint16_t * | ay, | ||
| uint16_t * | az | ||
| ) |
Obtain the raw accelerometer's readings.
- Parameters:
-
ax Pointer to a location for storing x-axis acceleration ay Pointer to a location for storing y-axis acceleration az Pointer to a location for storing z-axis acceleration
| int8_t CorobotC::getPitch | ( | uint16_t | ax, |
| uint16_t | ay, | ||
| uint16_t | az | ||
| ) | const |
Calculate the rotation angle of the Corobot along the pitch axis using the specified raw acceleration values.
- Parameters:
-
ax,ay,az Accelerometer reading on the X, Y and Z axes, respectively
- Returns:
- Pitch angle in degrees, similar to getRoll()
| int8_t CorobotC::getRoll | ( | uint16_t | ax, |
| uint16_t | ay, | ||
| uint16_t | az | ||
| ) | const |
Calculate the rotation angle of the Corobot along the roll axis using the specified raw acceleration values.
- Parameters:
-
ax,ay,az Accelerometer reading on the X, Y and Z axes, respectively
- Returns:
- Roll angle in degrees, similar to getPitch()
| void CorobotC::calibrateAccel | ( | uint16_t | ax, |
| uint16_t | ay, | ||
| uint16_t | az | ||
| ) |
Calibrate the accelerometer as "leveled" using the specified acceleration values.
- Parameters:
-
ax Acceleration value on the x-axis ay Acceleration value on the y-axis az Acceleration value on the z-axis
| void CorobotC::setLed | ( | Color | c, |
| bool | state | ||
| ) |
Set the state of the specified LED on the basic I/O board.
- Parameters:
-
c Color code of the LED, which can be either RED, YELLOW, or GREEN. Requests to set other colors will be silently ignored. state true to turn the specified LED on; false to turn off
| void CorobotC::setLedValue | ( | uint8_t | value | ) |
Set the LEDs on the basic I/O board to represent the binary of the specified value.
- Parameters:
-
value Value to be interpreted as binary. Only the 3 least significant bits will be used.
| void CorobotC::setRightLed | ( | bool | state | ) |
Set the state of the right LED (the green TX LED) on the controller board.
- Parameters:
-
state true to turn the LED on; false to turn off
| void CorobotC::setLeftLed | ( | bool | state | ) |
Set the state of the left LED (the yellow RX LED) on the controller board.
- Parameters:
-
state true to turn the LED on; false to turn off
| bool CorobotC::switchPressed | ( | ) | const |
Check whether the switch on the basic I/O board is currently pressed.
- Return values:
-
true the switch is pressed. false the switch is not pressed.
| void CorobotC::waitSwitchPress | ( | ) | const |
Wait until the switch on the basic I/O board is pressed.
If the switch is currently pressed, this function will return immediately
| void CorobotC::waitSwitchRelease | ( | ) | const |
Wait until the switch on the basic I/O board is released.
If the switch is currently released, this function will return immediately
| void CorobotC::waitRemote | ( | ) | const |
Wait until the remote Corobot is connected via Bluetooth.
Make sure that both Corobots call this same function during setup(). While calling this function, the special character '#' will be sent continuously to the remote Corobot. At the same time, the local Corobot is also expecting a '#' from the remote.
Member Data Documentation
| HardwareSerial& CorobotC::remote = Serial1 |
Serial object reference for communicating with the remote Corobot via Bluetooth.
It has exactly the same API as Arduino's Serial object (https://www.arduino.cc/en/Reference/Serial).
The documentation for this class was generated from the following files:
