รายการโครงงาน
01204322 Embedded Systems
ภาคปลาย ปีการศึกษา 2562 หมู่ 1
นายคเชนทร์ ธรรมมาสถิตย์กุล
นางสาวณัฐมนต์ ชินประสาทศักดิ์
นายลัทธวิทย์ กุลานุวัฒน์
นายอินทัช ภักดี
ที่มา : โครงงานนี้เกิดมาจากความคิดที่ว่าจะทำอะไรเพื่อให้ประหยัดพลังงานดี พวกเราก็ได้มองไปรอบห้องและได้เห็นกล้องวงจรปิดตัวหนึ่ง แล้วก็คิดได้ว่าเวลากล้องวงจรปิดจะทำงานตลอดเวลาไม่มีเวลาได้พัก จึงคิดโครงงาน Power Efficient Security Camera ขึ้นมา
ฟีเจอร์ : ดังที่กล่าวไว้ในที่มาเราจะทำกล้องวงจรปิดที่ประหยัดพลังงาน จึงมีฟีเจอร์หลักๆ อยู่ 2 อย่าง
- ฟีเจอร์แรก เป็นส่วน Detection system เป็นระบบที่ทำการตรวจจับว่ามีคนเดินเข้ามาภายในห้องหรือไม่ เพื่อนำไปตัดสินใจว่าจะเปิดหรือปิดกล้อง
- ฟีเจอร์ที่สอง คือ Camera System ซึ่งจะทำการควบคุมเปิด และปิดกล้องตามคำสั่งที่ได้รับ เพื่อที่จะถ่ายวิดีโอไว้ หรือปิดเพื่อประหยัดพลังงาน
อุปกรณ์ :
- 4 NodeMCU-32s
- 1 Raspberry Pi 4
- 2 OV7670 without FIFO
- 2 ST7735
- 2 HC-SR04
- 4 Breadboard
เทคนิค :
- เทคนิคในการตรวจจับว่ามีคนอยู่ภายในห้องหรือไม่ คือ เมื่อมี Sensor ตรวจพบว่ามีอะไรบางอย่างผ่าน Sensor จะบอกกับ Raspberry Pi 4 เพื่อนำรูปจากกล้องมาตัวละ 1 รูป และทำ Object detection บนรูปที่ได้รับมาบน Raspberry Pi 4 เพื่อดูว่ามีคนอยู่ภายในรูปหรือไม่ โดยใช้ Tensorflow โดย Model ของ Neural network ที่ใช้จะเป็น Model ของทาง Tensorflow ที่ใช้ตรวจจับวัตถุได้หลายอย่าง
- Protocol ที่ใช้ในการติดต่อสื่อสารไร้สายผ่านตัวบอร์ดทั้งหมดที่ใช้ใน Project คือ HTTP เนื่องจากง่ายในการนำไปใช้ และสามารถส่งข้อมูลที่มีความซับซ้อนได้ เช่น รูปภาพ
- เพื่อให้การส่งรูปจาก NodeMCU-32s ไปยัง Raspberry Pi 4 มีความรวดเร็วจึงส่งแบบ Btye stream และนำไปบันทึกเป็นรูปบน Raspberry Pi 4 เพื่อลดภาระของทาง NodeMCU-32s
- Raspberry Pi 4 ใช้ Python เพื่อ Run Flask และ Tensorflow lite
- NodeMCU-32s ใช้ C++ และ Arduino IDE เพราะมีการ Support และ Libraries เยอะ





นายนภณัฏฐ์ ทองตัน
นายวราฤทธิ์ หงษ์กำเนิด
นายศรัณย์ภัทร ลาวัง
นายสาริน ลิ่มกุล
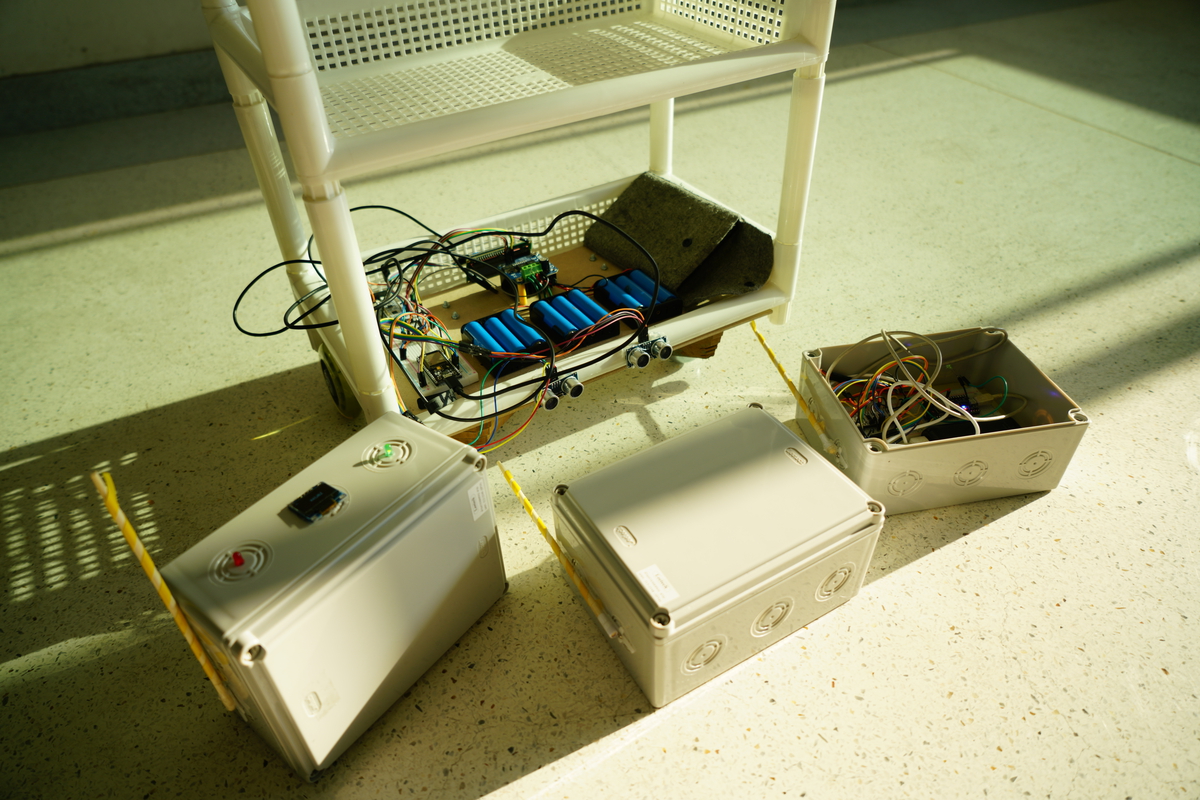
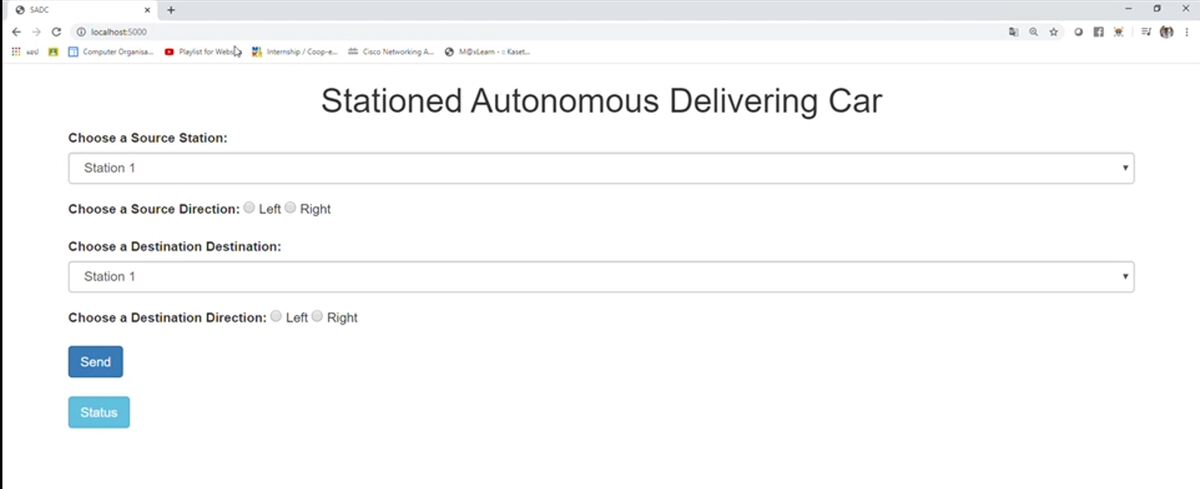
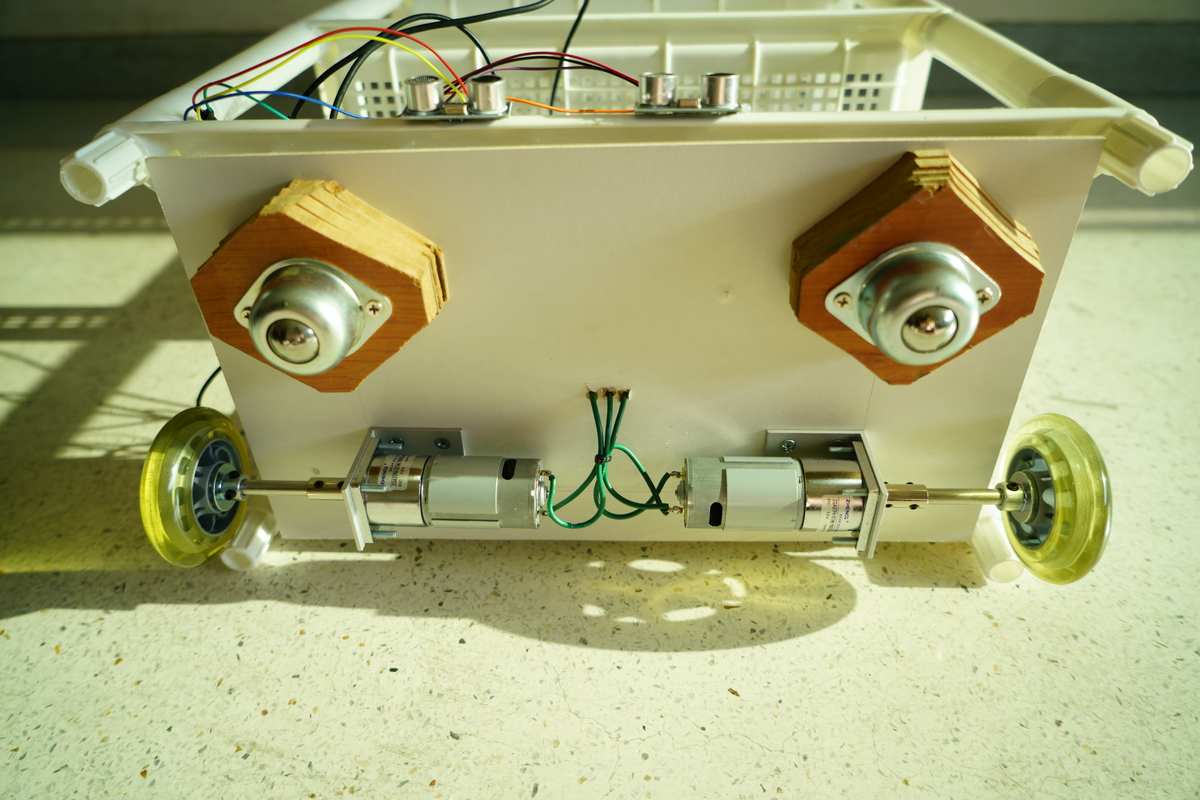
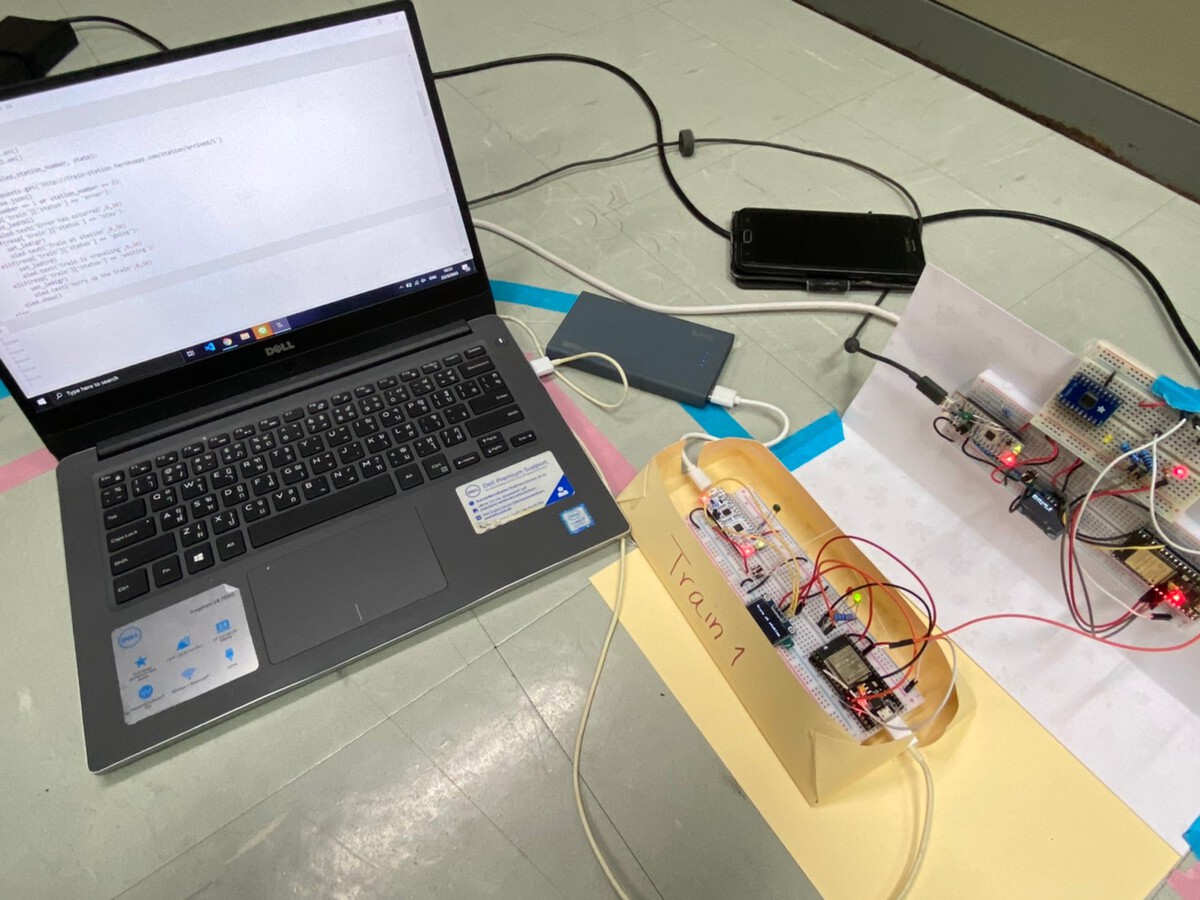
เกี่ยวกับโปรเจค : โปรเจคของเราคือ รถส่งของตามจุดที่กำหนด โดยจะมีการตั้ง station ต่างๆเพื่อให้รถเดินทางไป โดยมีวิธีการทำงานดังนี้ user จะต้องทำการสั่งคำสั่งผ่านหน้าเว็ปไซต์ของ SADC โดยจะต้องระบุว่าจะให้ไปรับของที่ไหน และ จะให้ไปส่งของที่ไหน ต่อจากนั้น ระบบจะทำการประมวลผลเส้นทาง และ ทำการเดินทางไปยังจุดรับของ รอรับของ และ นำทางไปยังจุดส่งของเพื่อส่งของต่อไป
ที่มา : เนื่องจากในสถานการณ์ปัจจุบันมีโรคระบาด โควิด-19 เกิดขึ้นทำให้เราจะต้องทำการ social Distancing เวลาเขาต้องการรับส่งของภายในอาคาร หรือ เป็นภายในโรงพยาบาลที่ต้องส่งอาหาร ส่งยาให้ผู้ป่วย และ เราไม่อยากให้หมอ ให้ไปใกล้ชิดผู้ป่วย ที่เป็นโรค หรือ มีความเสี่ยง เราจึงสร้างหุ่นยนต์ตัวนี้ขึ้นมา
ฟีเจอร์
- ตัวรถ สามารถทำการเดินทางไปยังจุดรับหรือส่งของที่ได้รับมากจาก Application และ สามารถเดินทางไปยังจุดๆนั้นได้ และ สามารถหยุดเพื่อไม่ให้ชนสิ่งของด้านหน้ามันได้
- สถานี จะทำการส่งสัญญาณมาให้รถทำการคำนวณระยะทาง และ ทำการรอรับสัญญาณจาก Application เพื่อที่จะได้รู้ว่ามีรถกำลังมาไหม ถ้ารถกำลังมา ไฟก็จะกลายเป็นสีแดง และ ถ้ารถมาจอดแล้วจะมีไม้กั้น เพื่อที่จะให้คนสามารถเดินทางไปมาได้ และ ได้ทราบว่าตอนไหนรถจะออก
- Application สามารถคำนวณเส้นทางในการเดินรถ แจ้งสถานะของรถ และ คำนวณสถานะของสถานี
อุปกรณ์
- Nucleo L432KC 4 ตัว
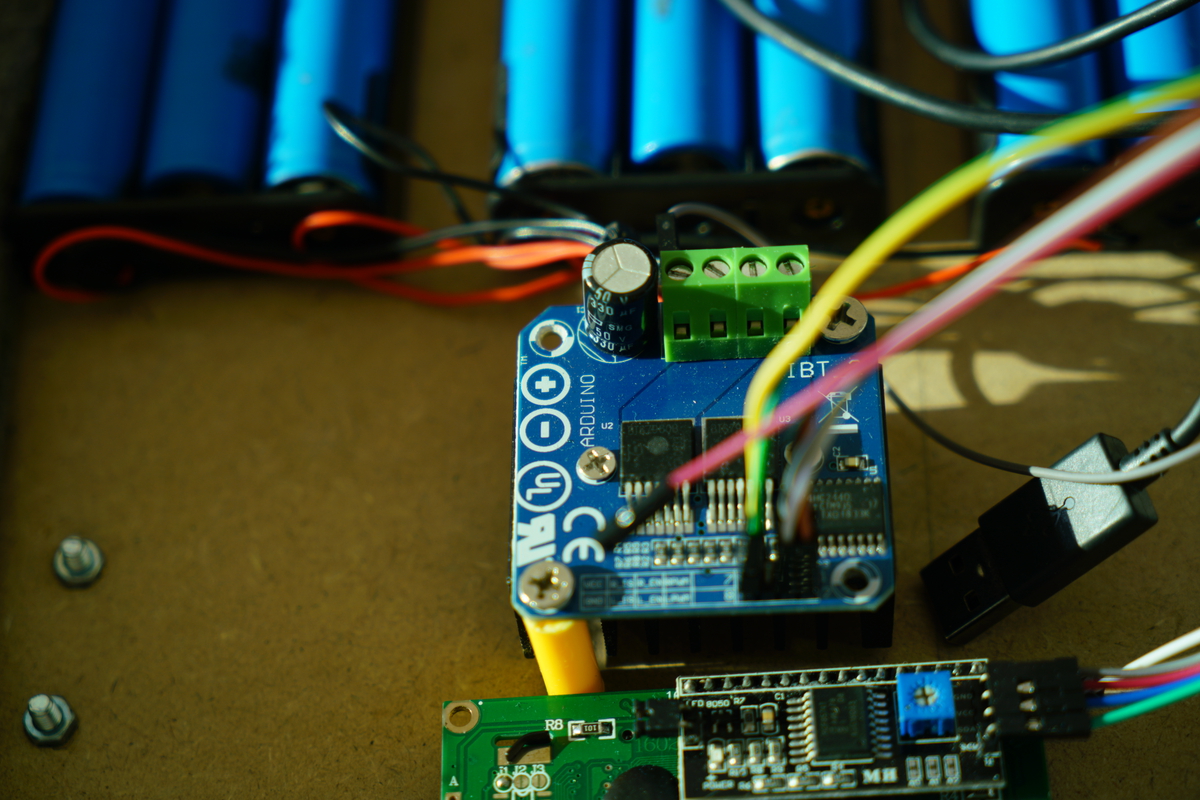
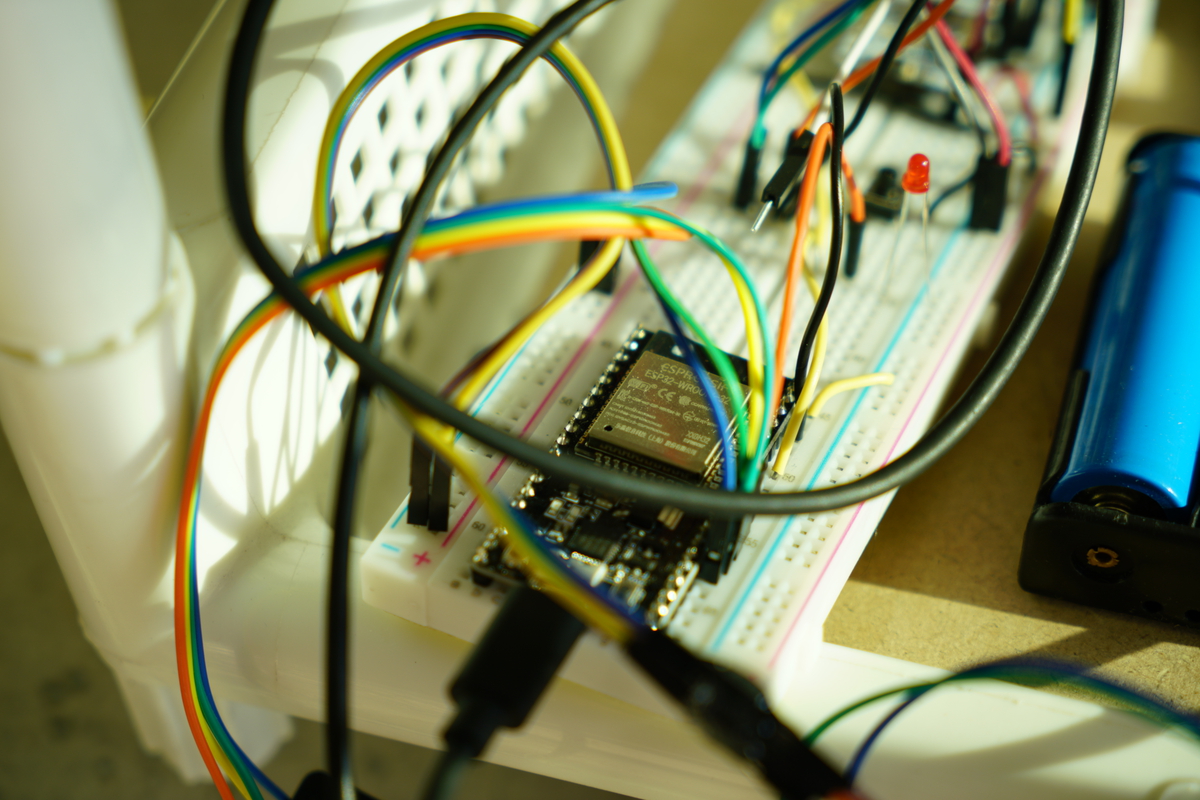
- ESP32 4 ตัว
- HC-SR04 2 ตัว
- MicroServo SG 90 3 ตัว
- LED 7 ตัว
- Gear Motor 2 ตัว
- OLED screen 3 ตัว
- LCD screen 1 ตัว
- PowerBank 4 อัน
เทคนิค
- เทคนิคในการคำนวณระยะทาง เนื่องจากเราต้องการให้ราคาของตัวหุ่นถูกที่สุด เราจึงเลือกลองใช้การคำนวณระยะทางผ่าน RSSI ของสัญญาณ Wi-Fi ของสถานีที่ได้รับมาจากตัวหุ่น ผ่าน Algorithm ที่ใช้คำนวณระยะทาง
- การสื่อสารกันของอุปกรณ์ทั้งหมดทำผ่าน HTTP protocal เพื่อให้ง่ายต่อการติดตั้ง และ เป็นสิ่งที่คิดว่าสถานที่ส่วนใหญ่น่าจะมีกันอยู่แล้ว ซึ่งก็คือ Wi-Fi นั่นเอง
- Application ใช้ Flask คู่กับ MongoDB เพื่อทำการสร้าง BackEnd ที่มีความเร็วในการคำนวณและสามารถเก็บข้อมูลการเดินทางทั้งหมดไว้ได้ เลือกที่จะให้ประมวลบน local เนื่องจากจะทำให้ตัวหุ่นตอบสนองกับการสั่งงานได้เร็วกว่าการทำบน cloud server


นายคริษฐ์ พืชพันธุ์งาม
นายปกสินธ์ วรรณฉวี
นายเสฏฐวุฒิ แสงเจริญ
นายอินทัช ประกายศักดิ์
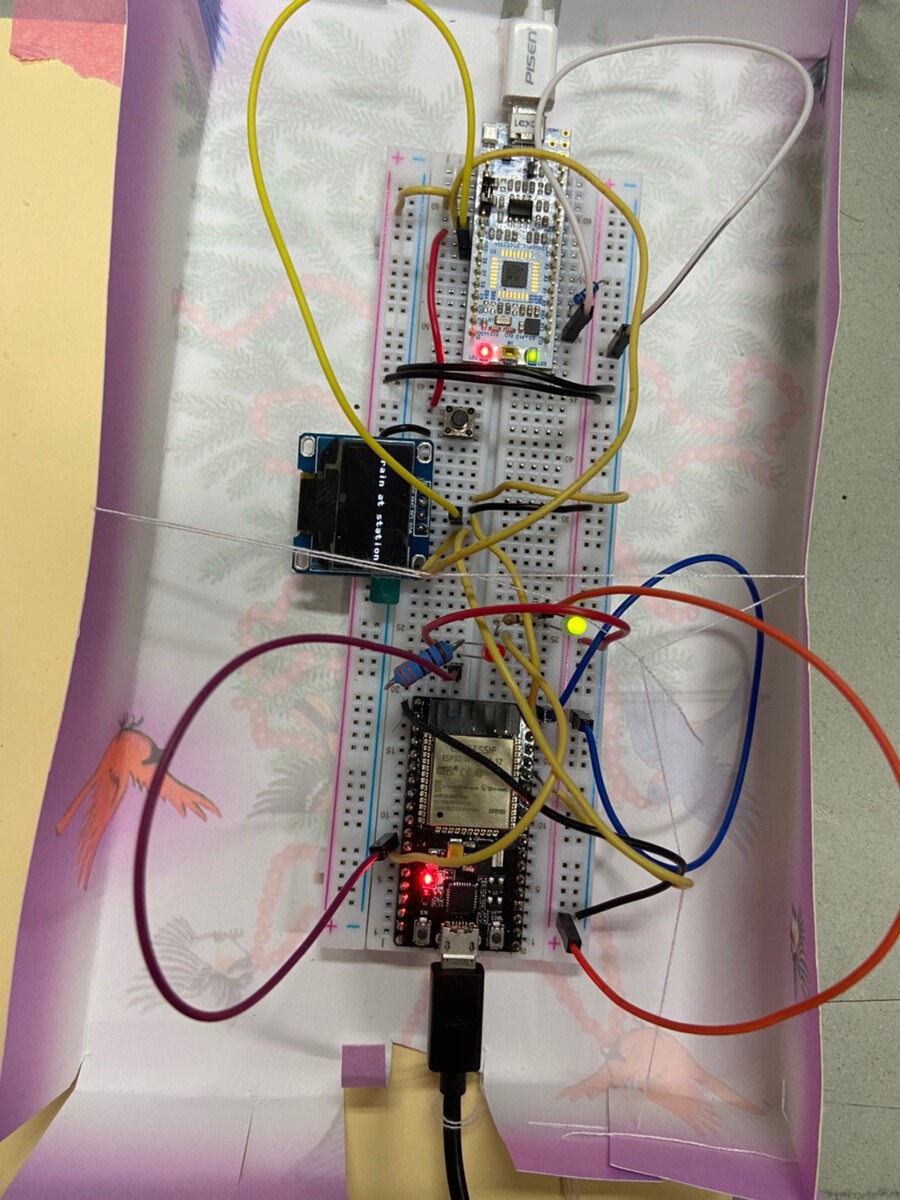
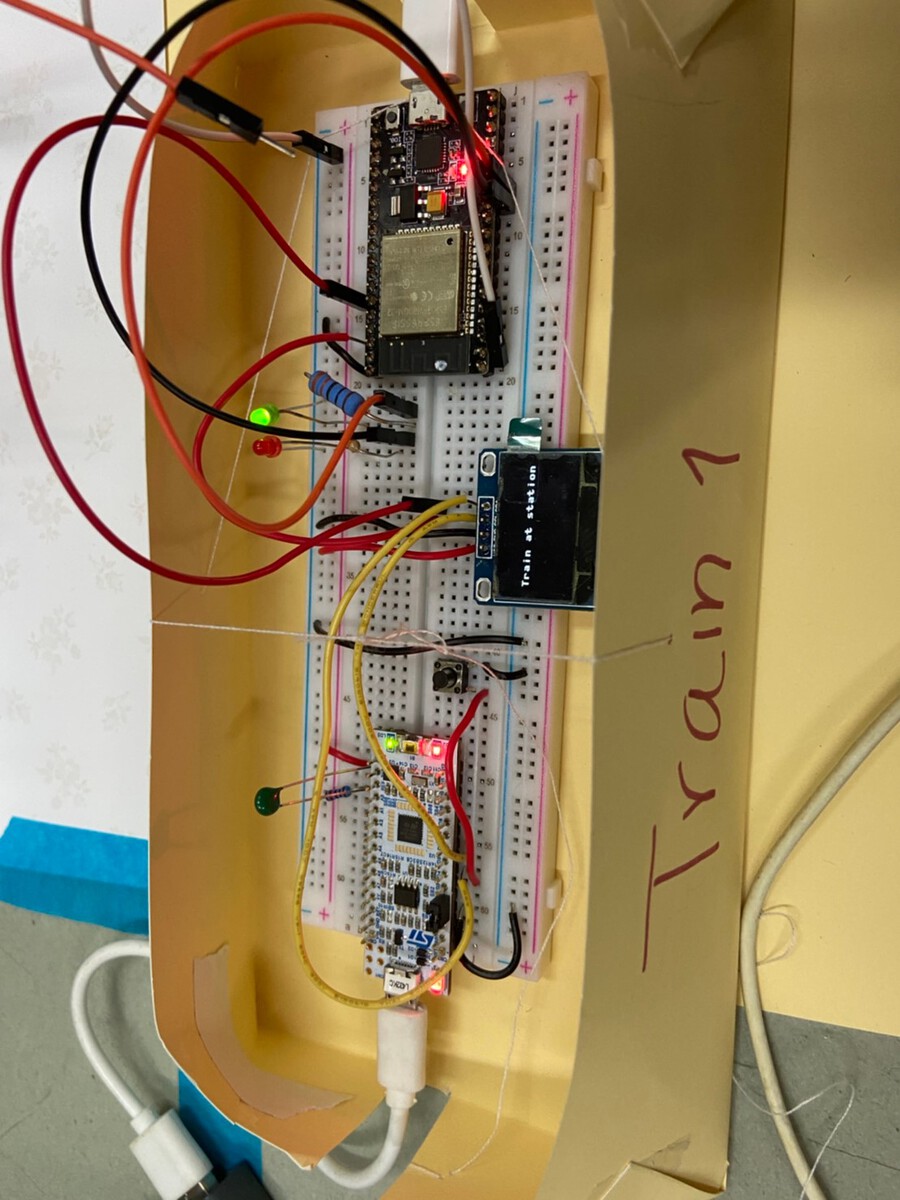
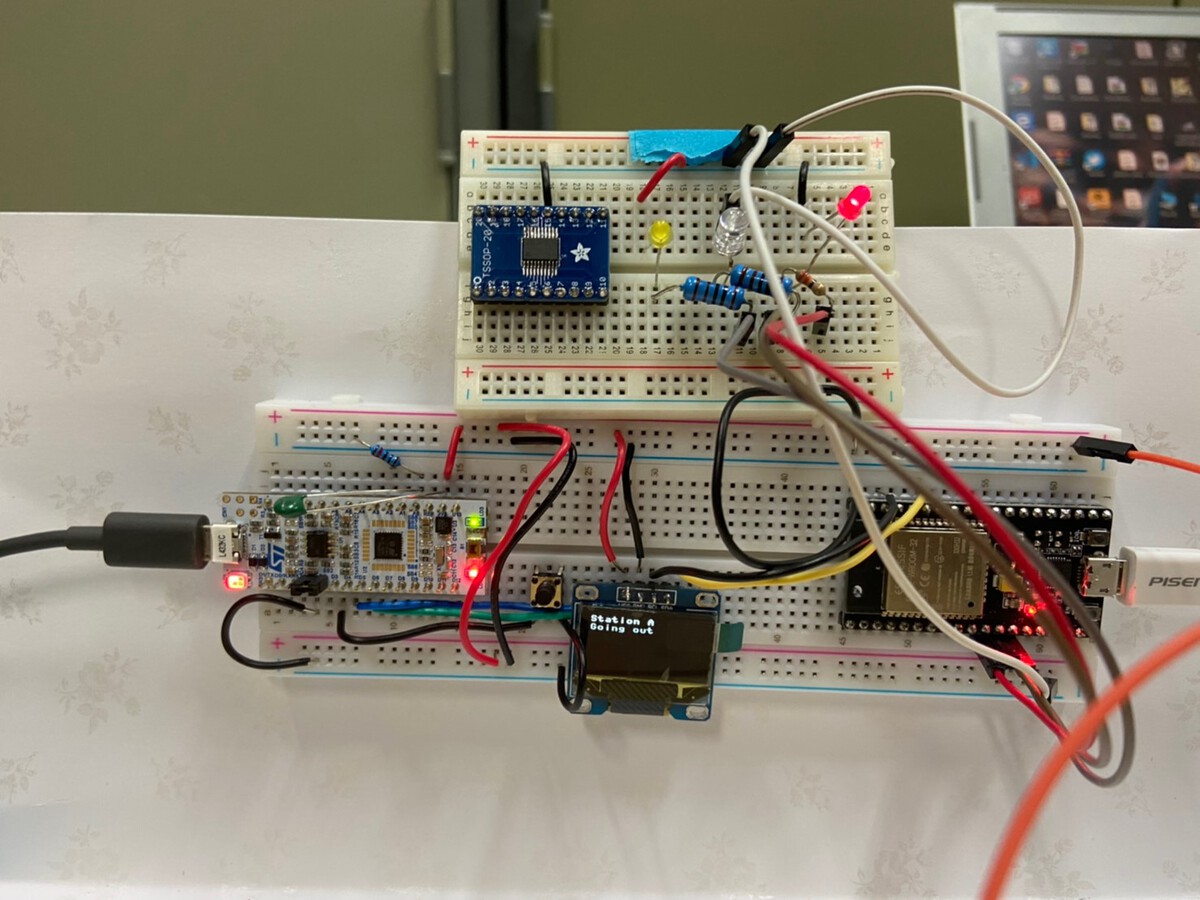
โปรเจคนี้จัดทำขึ้นเพื่อทำการจำลองการสื่อสารระหว่างสถานีรถไฟและรถไฟในสถานการณ์จริง โดยได้มีตัวสถานีทั้งหมด 2 สถานีและรถไฟจำนวน 2 คัน โดยตัวรถไฟสามารถส่งสัญญาณบอกสถานีเมื่อเข้าถึงและสถานีจะเป็นตัวสั่งในการปล่อยรถไฟออกจากสถานีได้ อีกทั้งยังแสดงสถานะของทั้งตัวรถไฟและสถานีผ่านจอ OLED และไฟสถานะได้
+ ฟีเจอร์
- สามารถควบคุมสถานะของรถไฟและสถานะของสถานี ผ่านปุ่มบนบอร์ดได้ โดยปุ่มอยู่ควบคุมบนบอร์ด STM Nucleo ส่วนการควบคุมส่วนอื่นอยู่บน NodeMCU ซึ่งสามารถเชื่อมต่อกันได้
- สามารถดูสถานะทั้งบนรถไฟ (มีสามสถานะ) ได้บน OLED และหลอด LED เป็นสามสีได้ทั้งหมด และ สถานะของรถไฟได้ผ่านบน OLED และหลอด LED สามสีเช่นเดียวกัน
- ตรวจสอบสถานะบนหน้าเว็บได้
อุปกรณ์
- STM Nucleo L732 4 ตัว
- NodeMCU esp32s 4 ตัว
- ปุ่มกด 4 ปุ่ม
- บอร์ดพ่วง LED 4 บอร์ด ที่ประกอบด้วย ไฟ LED 3 สี ได้แก่ สีแดง สีเหลือง สีเขียว
กรณีสถานี
สีแดง คือ รถไฟออกไปแล้ว (สถานีรอให้รถไฟเข้ามา)
สีเหลือง คือ รถไฟเตรียมออก (บอกว่าสถานีจะเตรียมปล่อยรถไฟ)
สีเขียว คือ รถไฟจอดอยู่ (แทนว่าให้คนขึ้นได้)
เทคนิค
1 NodeMCU esp32s รับส่งข้อมูลบน Webserver โดย HTTP REST API ส่งข้อมูลสถานะเป็น JSON โดยตัว API เขียนด้วย node.js
2 บอร์ด Nucleo และ NodeMCU รวมถึง OLED เชื่อมต่อเป็น data bus แบบ I2C
3 Firmware บนบอร์ด Nucleo เขียนด้วย C++ โดยเขียนบน Real-time OS API และ บอร์ด NodeMCU esp32 s มีการรัน program บน Micropython
4 WebFrontend เขียนด้วย HTML + javascript
5 WebFrontend และ RestAPI backend ถูก deploy ด้วย heroku
*ข้อมูลเพิ่มเติม วิธีการทำงานของระบบอธิบายในวิดิโอค่อนข้างละเอียด
GitHub ผลงานเพิ่มเติม
(WebFrontend)
https://github.com/unpolygon/train-station-frontend
(RestAPI backend)
https://github.com/unpolygon/train-station-backend

+ ที่มาและรายละเอียดโครงงาน
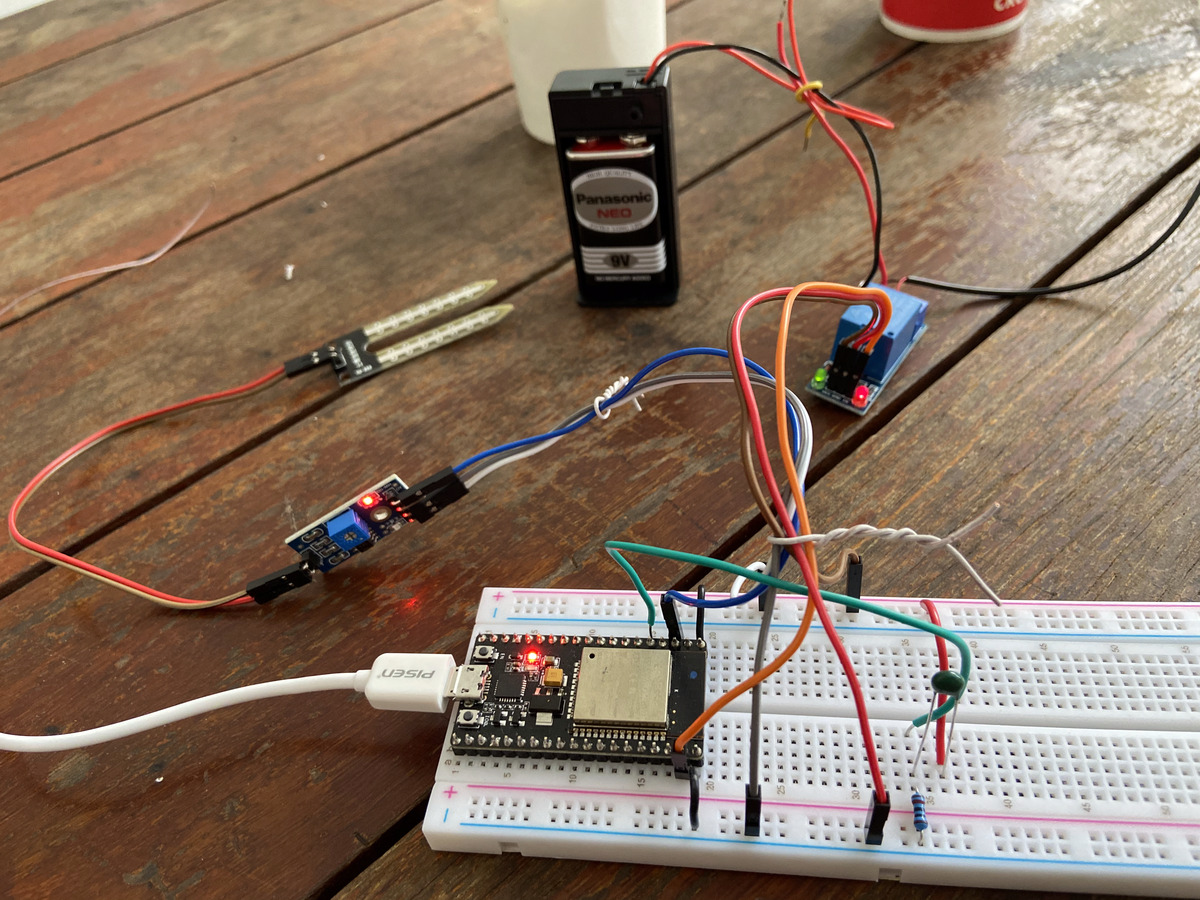
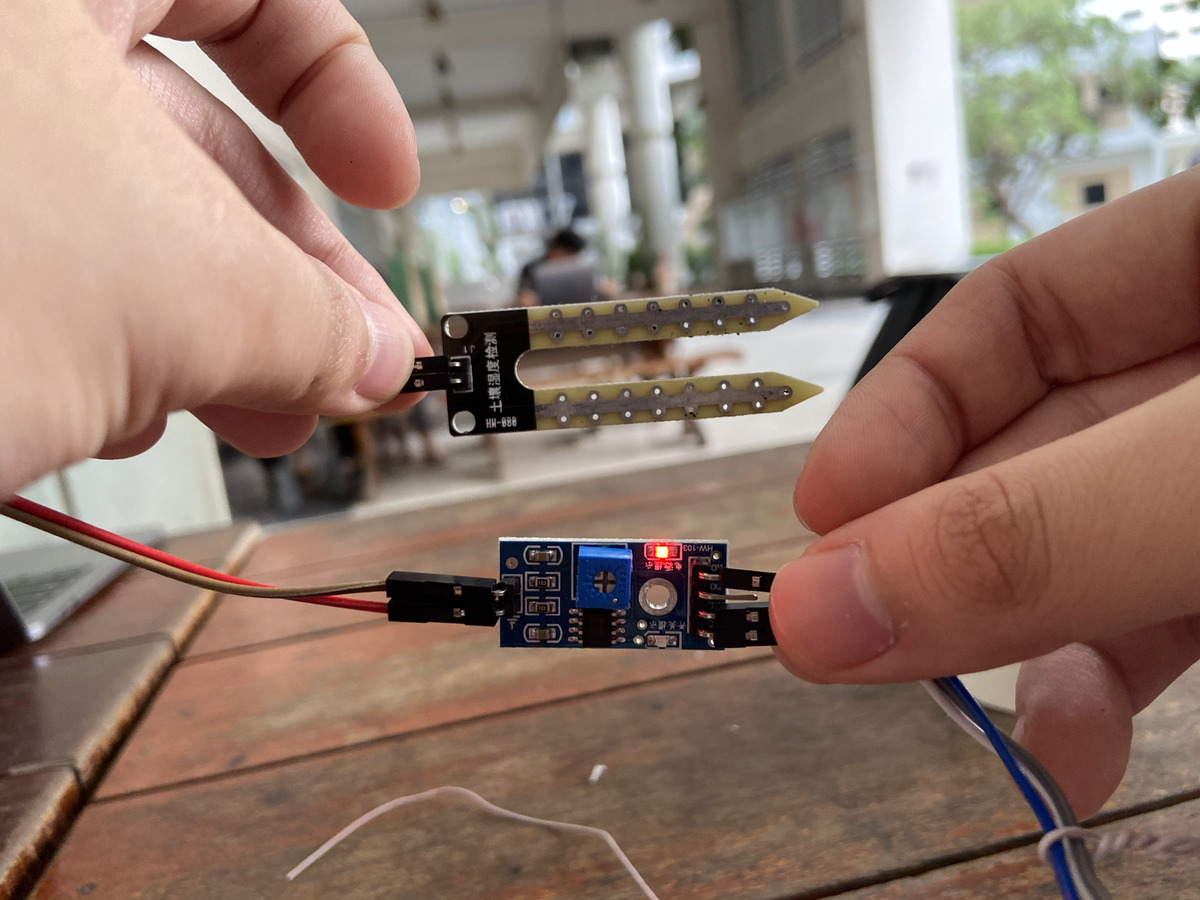
เนื่องจากในสภาพแวดล้อมปัจจุบันมีผู้ที่อาศัยอยู่ต่างจังหวัดและได้ซื้อจับจองห้องคอนโดมิเนียมกันเป็นจำนวนมาก ซึ่งอาจเป็นเพราะจะหวังเกร็งกำไรในอนาคตก็ดีหรือจะหวังเพื่อการอยู่อาศัยในภายภาคหน้าก็ดี การจับจองคอนโดมิเนียมนั้นภายในห้องอาจมีการปลูกต้นไม้จริง เพื่อประดับห้องให้สวยงามซึ่งอาจทำให้เกิดปัญหากับผู้ที่ไม่ได้อาศัยอยู่กับคอนโดตลอดเวลาหรือมีการขึ้นลงระหว่างกรุงเทพฯ และต่างจังหวัดบ่อยๆ ซึ่งอาจทำให้เกิดปัญหาต้นไม้ขาดน้ำได้เนื่องจากไม่มีผู้ดูแลต้นไม้และต้นไม้อาจจะตายในที่สุด ทั้งนี้คณะผู้จัดทำจึงได้เล็งเห็นปัญหาที่เกิดขึ้นโดยได้จัดทำเครื่องส่งสัญญาณรดน้ำจากระยะทางไกล โดยจะทำให้ผู้ที่ได้ใช้หมดความกังวลและหมดปัญหาเกี่ยวกับต้นไม้ที่ตายได้ค่ะ
+ Feature
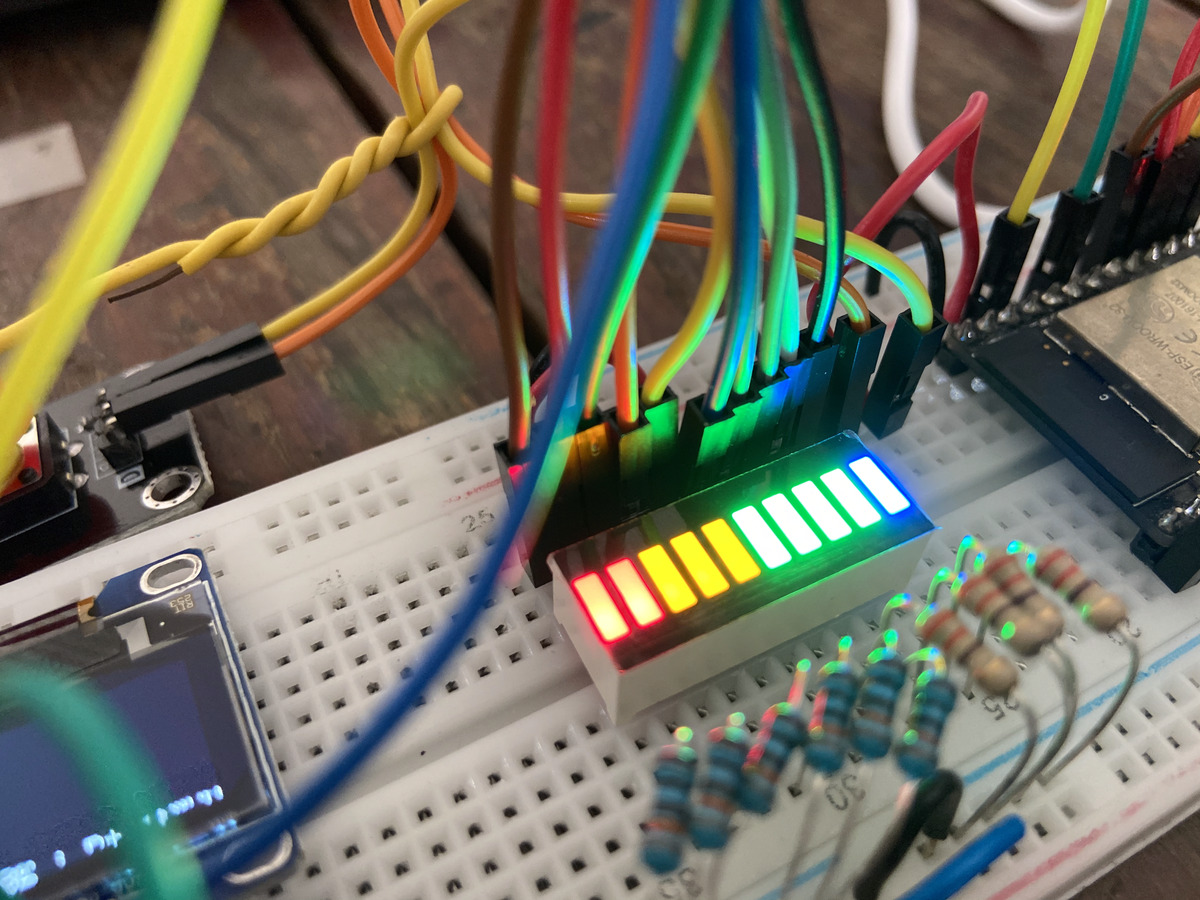
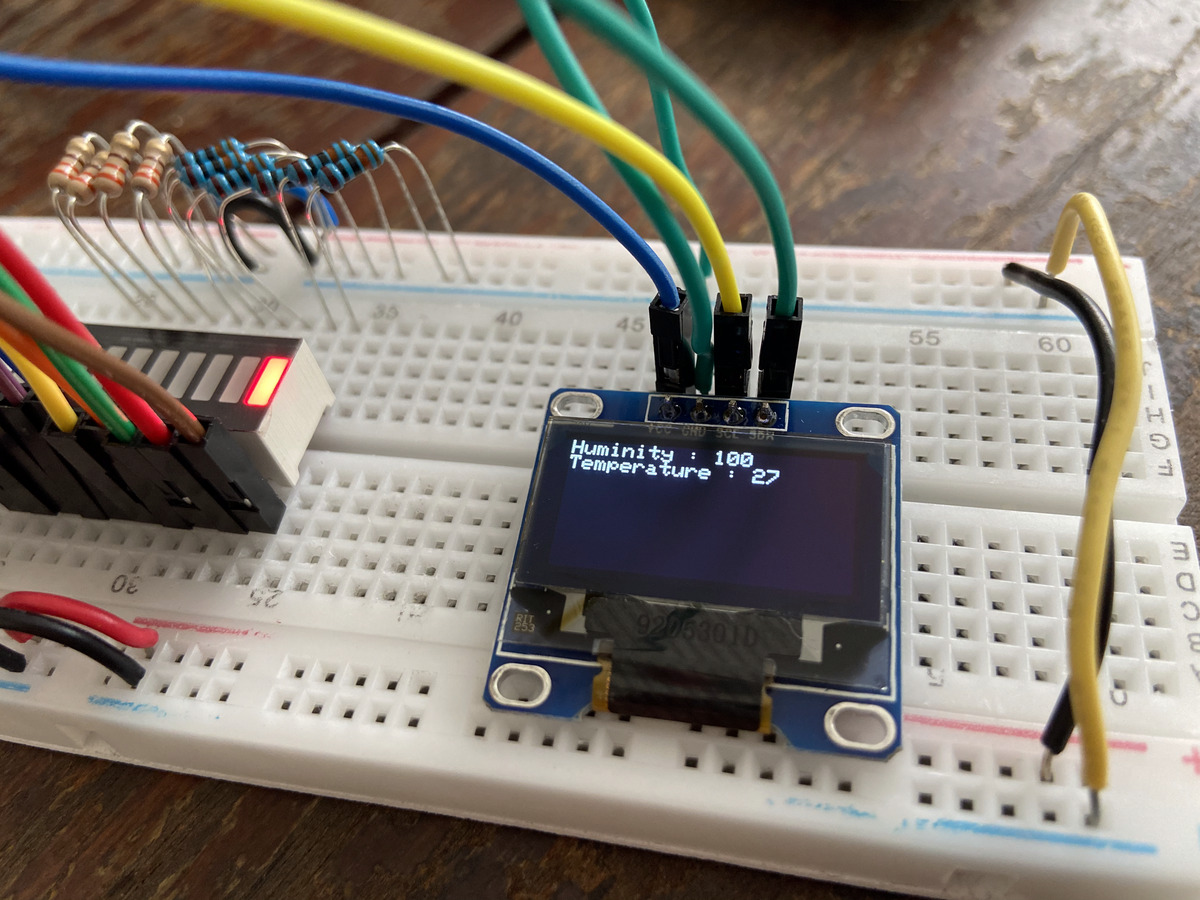
1. ภายในกระถางต้นไม้จะมีตัวตรวจวัดอุณหภูมิและความชื้น ค่าทั้ง 2 จะถูกส่งมายังหน้าจอ OLED ของบอร์ดตัวรับสัญญาณทางไกล เมื่อค่าความชื้นมีค่าน้อยกว่าค่าที่กำหนดจะทำให้ผู้ใช้สามารถกด Switch เพื่อทำการรดน้ำต้นไม้ เมื่อในกระถางต้นไม้มีค่าความชื้นสูงขึ้นจนถึงระดับที่เหมาะสม ในบอร์ดตัวรับสัญญาณทางไกลจะแสดงไฟ LED 10 Segment ติดครบทุกดวง และการรดน้ำต้นไม้จะสิ้นสุดลงอัตโนมัติ
2. เมื่อมีสิ่งมารบกวน อาทิ แมลง หรือ สัตว์ที่อาจเป็นศัตรูต่อต้นไม้ จะมีการตรวจจับสัญญาณและส่งมายังหน้าจอ OLED ของบอร์ดตัวรับสัญญาณทางไกลเช่นกัน โดยจะปรากฏบนหน้าจอ OLED ว่า "Warning Insect!!" และใบพัดที่ทำการติดไว้บริเวณต้นไม้จะทำการหมุนอัตโนมัติเพื่อขัดไล่สิ่งรบกวนและจะทำการหยุดอัตโนมัติเมื่อตรวจจับได้ว่าไม่มีสิ่งรบกวนแล้วค่ะ
+ อุปกรณ์
- ESP32-WROOM-32 : 3 Pieces
- OLED 128x64 : 1 Piece
- LED 10 Segment : 1 Piece
- Resistor 330 ohm : 10 Pieces
- Switch : 1 Piece
- Water pumper : 1 Piece
- Relay 5V : 1 Piece
- Thermistor : 1 Piece
- Soil moisture sensor : 1 Piece
- Resistor 10K ohm : 1 Piece
- Battery 9V : 1 Piece
- rubber tube : 1 Piece
- Motor driver BTS 7960 : 1 Piece
- Ultrasonic : 1 Piece
- Battery 9V : 2 Pieces
- Fan motor : 1 Piece
- Propeller : 1 Piece
+ เทคนิค
1. ใช้ ESP-Now ในการ Synchronize ทุกบอร์ดให้เชื่อมถึงกันโดยผ่านการใช้ Mac address ของ ESP32-WROOM-32 ซึ่งมีการบันทึกค่า Mac address ที่ต้องการจะส่งเพื่อเพิ่มความเร็วในการรับส่งข้อมูลและประสิทธิภาพในการทำงาน
2. สร้าง Struct เพื่อใช้ในการเก็บค่าที่ได้รับจากอุปกรณ์ และส่งข้อมูลผ่านทาง Function OnDataSent เพื่อส่งข้อมูลไปยังบอร์ดที่ต้องการ และสร้าง Function OnDataRecv เพื่อรับค่าข้อมูลที่ได้จากบอร์ดอื่นๆที่ส่งมาและจึงนำมาประมวณผลต่อที่ Function loop หรือ main เพื่อให้ส่วนของ Hardware ทำงาน
3. มีการทำ Error Checking อยู่เสมอเมื่อปลายทางไม่สามารถรับข้อมูลได้ หน้าจอ Serial Monitor จะแสดงผลว่า " Delivery Fail " และในกรณีที่ปลายทางสามารถรับข้อมูลได้ จะแสดงผลว่า " Delivery Success "



นางสาวกัลยา จีรชีวีกุล
นางสาวชัญญา พุกกะรัตน์
นางสาวพรรษชล เผ่าทิตธรรม
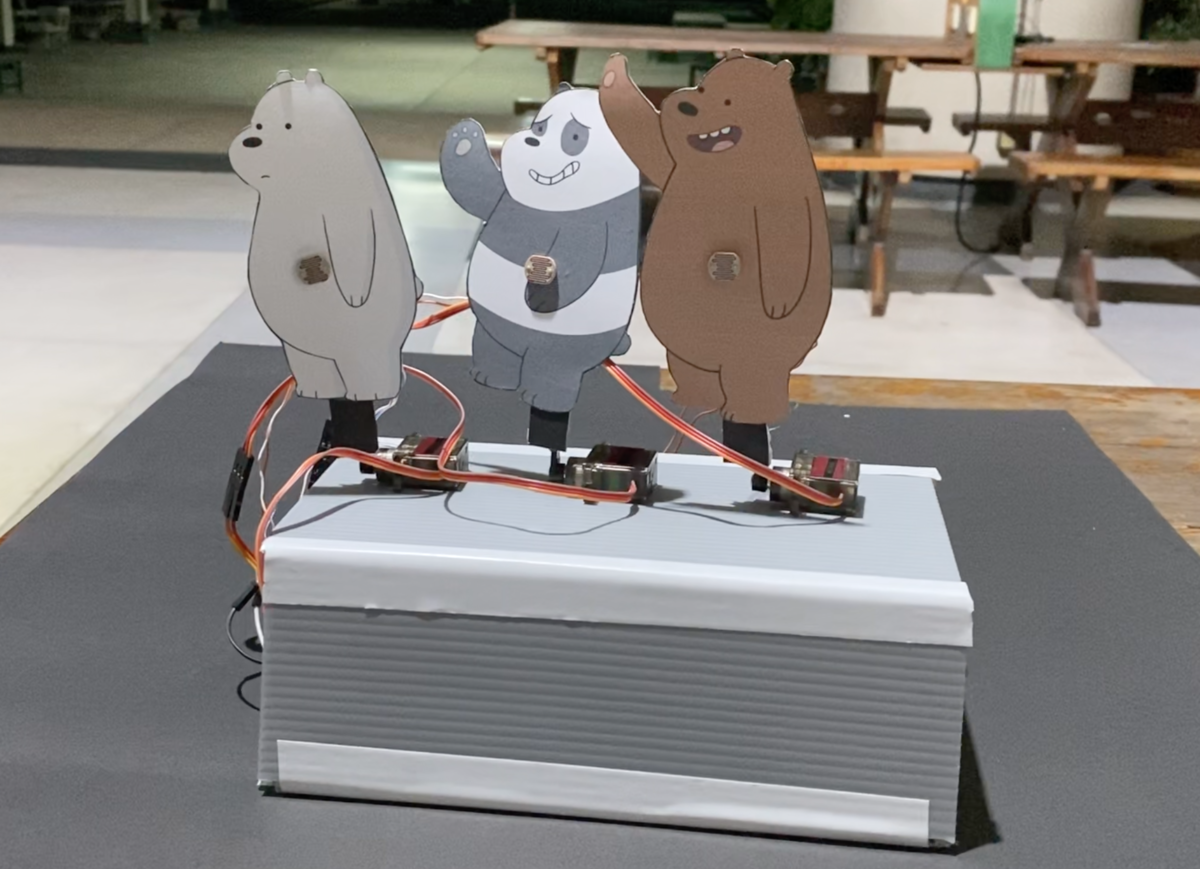
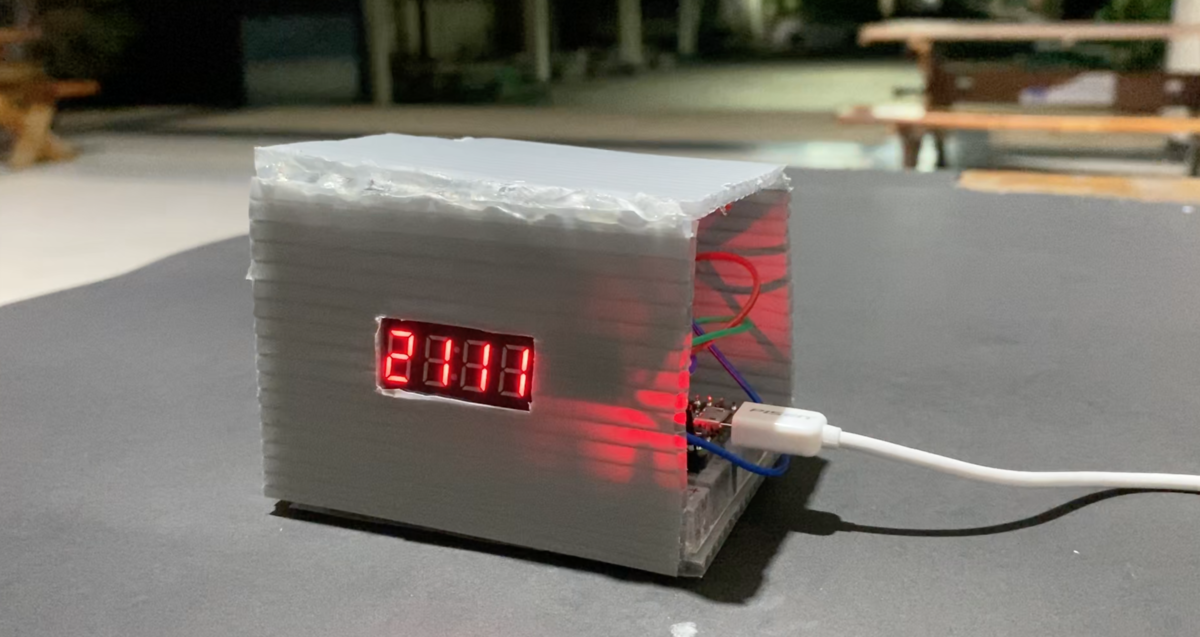
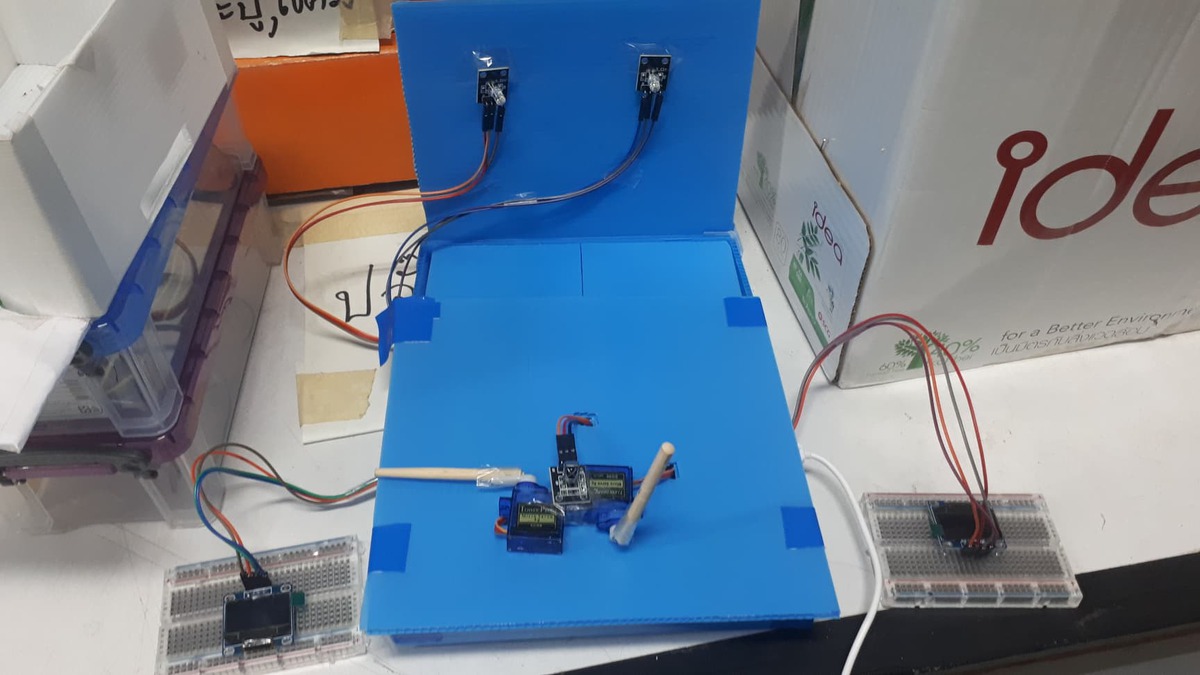
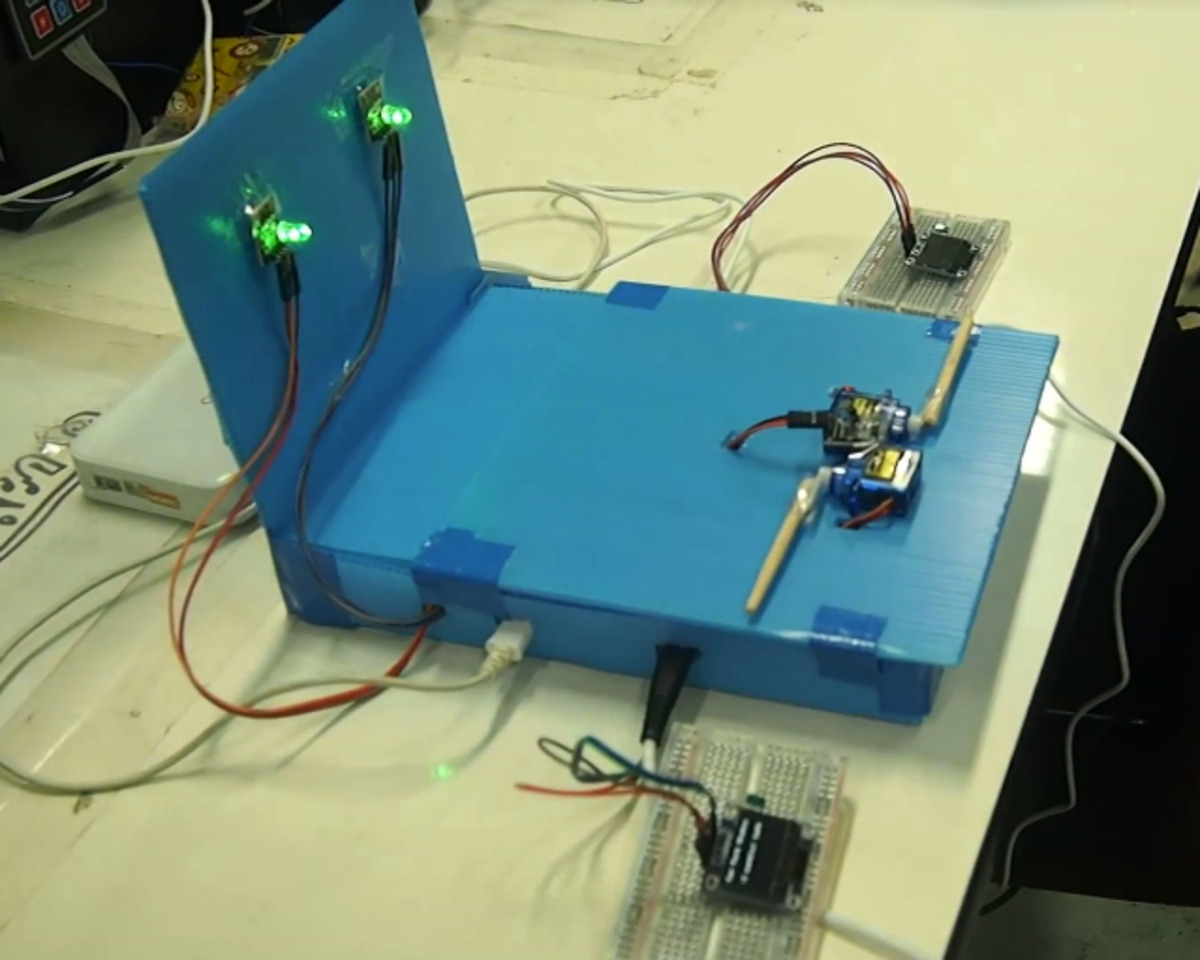
Cool^2 awake is an advanced alarm clock that comes with a laser game and vibrating bed. When it's time to wake up the clock will alarm and it will trigger the vibration motor at your bed and the servo to raise the bullseye up. If you can fire the laser beam on all 3 targets the bullseye will fall down and the alarm sound and vibration motor will stop. This clock definitely wakes you up and you will never be late for your appointment time.
ที่มา:
เนื่องจากบางทีตอนที่นาฬิกาปลุกแล้ว เราแค่ปิดมันแล้วนอนต่อ อาจทำให้เราไปเรียนไม่ทัน หรือไปตามเวลาที่นัดหมายไม่ทัน กลุ่มของเราได้มองเห็นปัญหานี้และได้จัดทำนาฬิกาปลุกซึ่งเมื่อถึงเวลาปลุกแล้วจะไม่สามารถลุกขึ้นมาปิดเฉยๆได้ ช่วงเวลาที่ใช้ในการปิดเสียงและสั่นของนาฬิกาปลุกอาจไม่นาน แต่จะช่วยทำให้ตื่นแน่นอน
ฟีเจอร์:
1. เมื่อถึงเวลาปลุก buzzer ก็จะดังขึ้นเป็นเสียงปลุก และเตียงก็จะสั่นเพื่อปลุก ด้านเป้ายิงเลเซอร์ก็จะตั้งขึ้นมา
2. เมื่อยิงเลเซอร์โดนเป้ายิงทั้ง 3 อัน เป้ายิงจะล้มลง buzzer เสียงปลุกก็จะหยุด และแรงสั่นที่เตียงนอนก็จะหยุดเช่นกัน
อุปกรณ์:
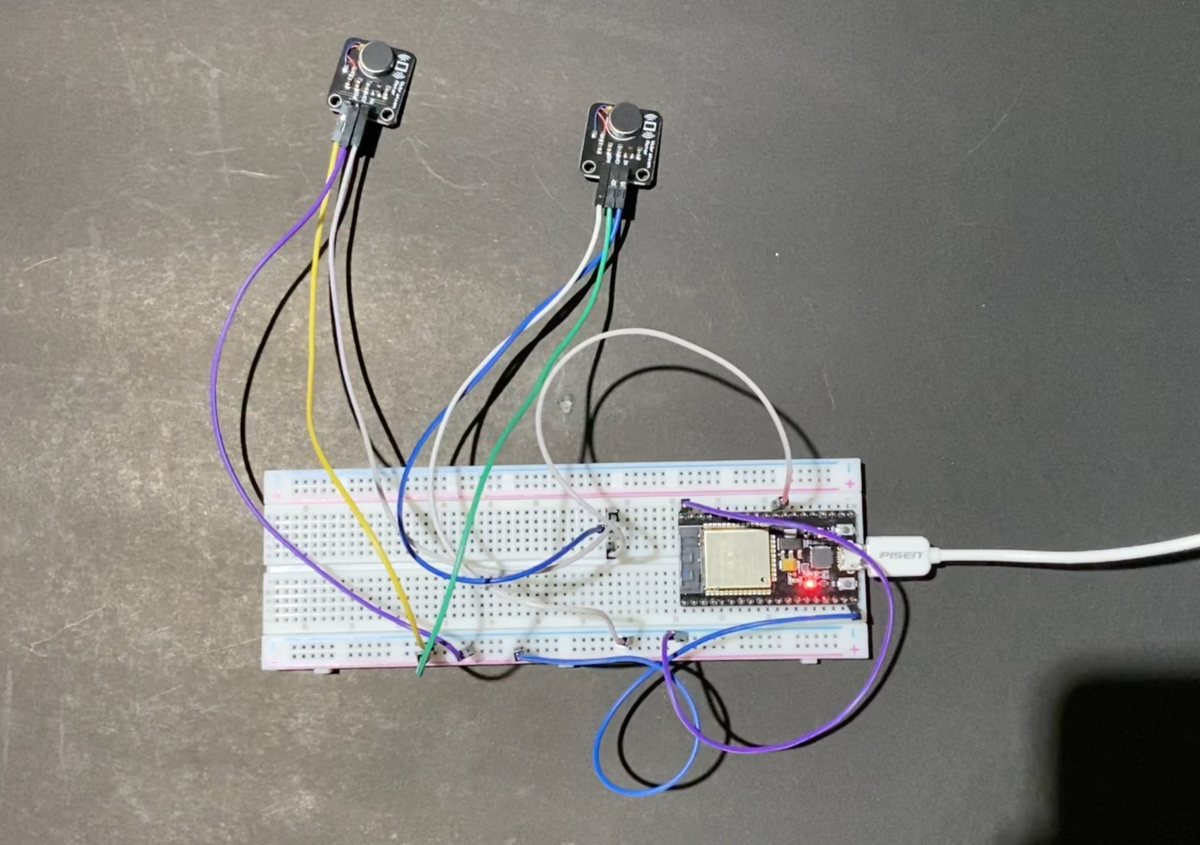
- ESP32-WROOM-32 (x3)
- Buzzer
- TM1637
- LDR Photoresistor (x3)
- Servo (x3)
- 2 x 1.5V AA Battery Case Holder (x3)
- Jumper wire male to female (x27)
- Jumper wire female to female (x3)
- 1.5V AA Battery (x6)
- 220-Ohm Resistor (x3)
- Vibration Motor Module (x2)
เทคนิค:
- เอาเวลา real time มาจาก NTP Server
- ใช้ ESP-Now ในการเชื่อมต่อบอร์ดทุกตัวผ่านการใช้ Mac address

นางสาวเมธาพร ทองแท้
นางสาวกมลชนก ศิริพจนาทิพย์
นางสาวณิชกานต์ รังษีวงศ์
นางสาวพิมพิรัตน์ วิเศษไชยะ
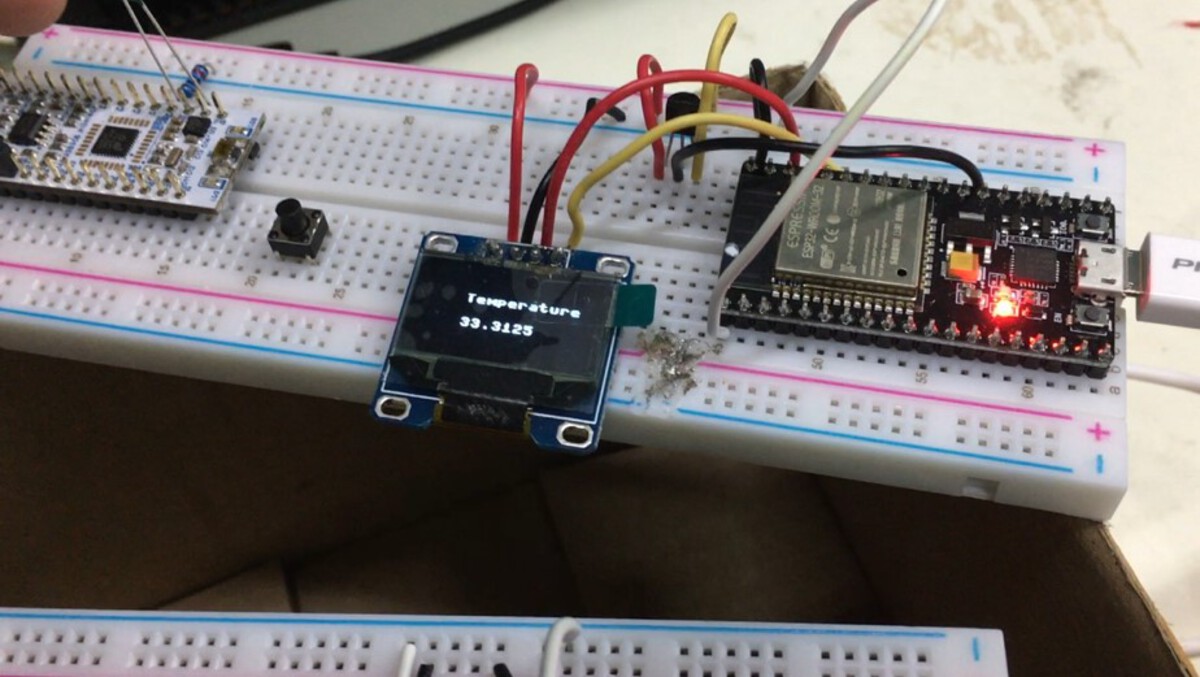
ที่มา :
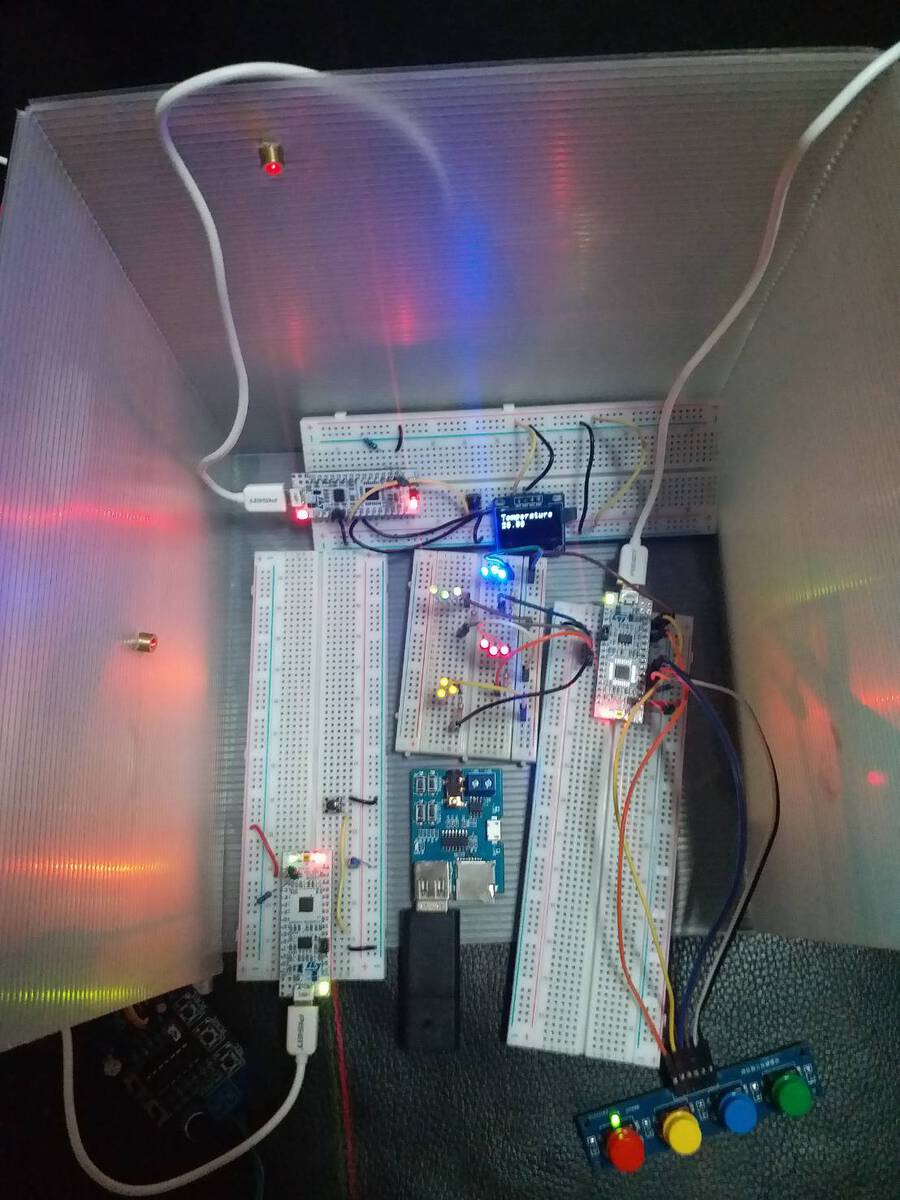
ในช่วงที่ Covid-19 กำลังระบาดนี้ เราควรที่จะอยู่บ้านเพื่อช่วยลดการระบาดของโรคนี้ หลายๆคนอาจจะเบื่อ ที่จะต้องอยู่บ้านเฉยๆ กิจกรรมที่ทำในบ้านก็จำเจ กลุ่มของเราจึงคิดแนวทางในการแก้ปัญหานี้ สิ่งนี้ก็คืออุปกรณ์สำหรับสร้างความบันเทิงภายในบ้าน สำหรับท่านที่ต้องการเสียงเพลง และความสนุกสนาน กลุ่มเราจึงได้สร้าง Hang In There! ที่จะทำให้ท่านได้อยู่ในบ้านพร้อมความบันเทิงที่ครบครัน
ฟีเจอร์ :
- ระบบไฟหลากสีเพื่อสร้างความเพลิดเพลิน และสร้างบรรยากาศให้สนุกสนาน
- ระบบเสียง ลำโพง และไมโครโฟน สำหรับฟังเพลง และร้องเพลง
- ระบบวัดอุณหภูมิ เพื่อให้ท่านทราบอุณหภูมิภายในห้องพัก
- ระบบเกมสุ่มเลข เพื่อสร้างความสนุกสนาน สำหรับท่านที่ชอบความตื่นเต้น
เทคนิคและอุปกรณ์ที่ใช้ :
- บอร์ด NUCLEO-L432KC จำนวน 4 บอร์ด ใช้ควบคุมแต่ละฟีเจอร์ โดยพัฒนาด้วยภาษา C
- 12 x LED (blue, red, yellow and green - 3 for each color), LED light color changing
- 1 x 4-pin White I2C OLED 128x64 (SSD1306)
- 1 x 4-switch Module, 2 x switch, 2 x laser
- 1 x ISD 1820 Voice Board Module
- 1 x MP3 Player Module

นายปูรณ์ โชตธีรวสุ
นายชิษณุพงศ์ วรวิจิตรชัยกุล
นายกฤตพล จันทร์ศุภกุล
นายนรเศรษฐ์ โพธิ์ทอง
Binn is a game for relaxing and brain training that comes with 6 led rgb lights at display, 3 led rgb lights with oled and 3 buttons on controller. This is a memory test game, in game you have to remember all the colors flashing on the display. Until the light goes out, you have to press the button according to the led color in the correct order.
ฟีเจอร์
+ การเชื่อมต่อระหว่างบอร์ด โดยเกมจะเริ่มเมื่อทุกบอร์ดเชื่อมต่อกัน
+ การแสดงไฟบนบอร์ด player ที่กดแบบ sequence เรียงจากซ้ายไปขวา (ไฟที่ปรากฏทั้งสามดวงจะไม่ได้มาจากการกดแต่ละครั้ง)
+ เกมทดสอบความจำ โดยจะจำสีที่ปรากฏขึ้นแล้วกดตามลำดับเมื่อให้สัญญาณ
อุปกรณ์
+ esp32-wroom-32 x4
+ OLED x4
+ LED WB2812 30 LEDS x 1
+ Press Switch x 6
+ Reset Switch x1
+ Toggle Switch x1
+ Led x 4
+ Resistor x 2
เทคนิค
+ ใช้ 3-Way Handshake ในการ synchronice ทุกบอร์ดเข้าด้วยกัน และมีการบันทึก mac แต่ละบอร์ดไว้ล่วงหน้าเพื่อใช้ในการยืนยันตัวตนในตอนที่เชื่อมต่อ
+ ใช้ esp-now เพื่อเพิ่มความเร็วในการรับส่งข้อมูลแบบ realtime ระหว่างบอร์ดทั้งสี่
+ เพิ่มความเร็วในการส่งและการประมวลผล (บนบอร์ด control) โดยใช้วิธีส่งข้อมูลทุกครั้งที่กดปุ่มบนบอร์ด player ซึ่งช่วยให้ข้อมูลที่ส่งในแต่ละครั้งลดลง




Introduction :
สร้างโมเดลจำลองกศูนย์อาหาร โดยนำเทคโนโลยี embedded มาประยุกต์และปรับใช้ อย่างเช่น การสั่งอาหารหรือการเรียกเก็บเงินโดยกดเพียงแค่ปุ่มที่อยู่บนโต๊ะซึ่งเมนูอาหารที่สั่งจะส่งไปยังร้านค้าโดยอัตโนมัติส่วนจำนวนเงินที่ต้องจ่ายก็จะแสดงผ่านจอบนโต๊ะเพื่ออำนวยความสะดวกให้กับลูกค้าและยังมีไฟคอยบอกร้านค้าว่าโต๊ะตัวไหนที่ยังไม่ได้รับอาหาร ในส่วนของร้านค้ามีการแสดงเมนูอาหารและหมายเลขโต๊ะที่สั่ง นอกจากนี้ยังมีการแสดงปริมาณสต๊อกอาหารที่เหลืออีกด้วย โดยผู้จัดทำหวังว่าระบบนี้จะช่วยให้การจัดการในศูนย์อาหารมีประสิทธิภาพมากขึ้น
features :
- ระบบออเดอร์อาหารจากโต๊ะลูกค้า: ทำให้ลูกค้าสามารถสั่งอาหารจากโต๊ะของลูกค้าไปยังร้านอาหารที่ต้องการได้
- ระบบคิวอาหารของร้านอาหาร: ทำให้ทราบออเดอร์อาหารที่ลูกค้าสั่งมาจากแต่ละโต๊ะได้
- ระบบเช็คสต๊อกสินค้า: มีการเช็คปริมาณสินค้าที่เหลืออยู่
- ระบบเช็คบิลอัตโนมัติ: ลูกค้าสามารถเช็คบิลจากโต๊ะโดยค่าอาหารจะแสดงในหน้าจอบนโต๊ะลูกค้า
- ระบบวัดอุณหภูมิร้านอาหาร: บอกอุณหภูมิภายในร้าน
- ระบบแจ้งเตือนอาหาร: ร้านอาหารสามารถรู้ว่าโต๊ะไหนที่ยังได้รับออเดอร์ไม่ครบ
Eqiupment :
Board 1 :
- ESP32-WROOM-32
- OLED with SSD1306 driver
- LED
- Resistor 330 ohm
- Resistor 10k ohm
- Button * 3
- Thermistor (TTC05103) + 10K resistor
Board 2 :
- ESP32-WROOM-32
- OLED with SSD1306 driver
- LED
- Resistor 330 ohm
- Resistor 10k ohm
- Button * 3
- Thermistor (TTC05103) + 10K resistor
Board 3 :
- ESP32-WROOM-32
- OLED with SSD1306 driver
- LED
- Resistor 330 ohm
- Resistor 10k ohm
- Button * 3
- Thermistor (TTC05103) + 10K resistor
Board 4 :
- ESP32-WROOM-32
- OLED with SSD1306 driver * 2
Technique:
- แต่ละบอร์ดติดต่อกันด้วยการใช้ protocol esp-now เพื่อทำการ broadcast และเช็ค MAC Address ของบอร์ดเชฟ และบอร์ดโต๊ะลูกค้า
- ส่วนของโต๊ะลูกค้าแต่ละโต๊ะจะติดตั้งบอร์ด ESP32 โดยลง Firmware micropython เพื่อใช้ในการจัดการระบบออเดอร์
- ลูกค้าสามารถเลือกร้านอาหารและสั่งอาหารได้ผ่าน switch(ใช้เทคนิค debouncing) โดยจะแสดงผลผ่าน OLED โดยมีการกด switch เพื่อ interrupt การสั่งออเดอร์แล้วทำการส่งข้อมูลไปยังบอร์ดที่เป็นตัวจัดการระบบคิวของร้านอาหารทั้งหมด
- บอร์ดที่เป็นตัวจัดการระบบคิวของร้านอาหาร (ESP32) จะรับคิวที่มาจากแต่ละโต๊ะอาหารแล้วส่งต่อไปแสดงผลที่ OLED ของแต่ละร้านอาหาร
- มีการแยก Thread ระหว่างการวัดอุณหภูมิ และการแสดงออเดอร์สินค้าที่โต๊ะลูกค้าสั่ง
- ใช้ dict เก็บออเดอร์ของแต่ละร้านอาหาร และทำการคำนวณราคาหลังจากกด switch เพื่อทำการเช็คบิล




นางสาวอสมาภรณ์ ดีวรัตน์
นางสาวณัฏฐวิตรา กิจวัฒนชัย
นางสาวศวิตา โฆสิตะมงคล
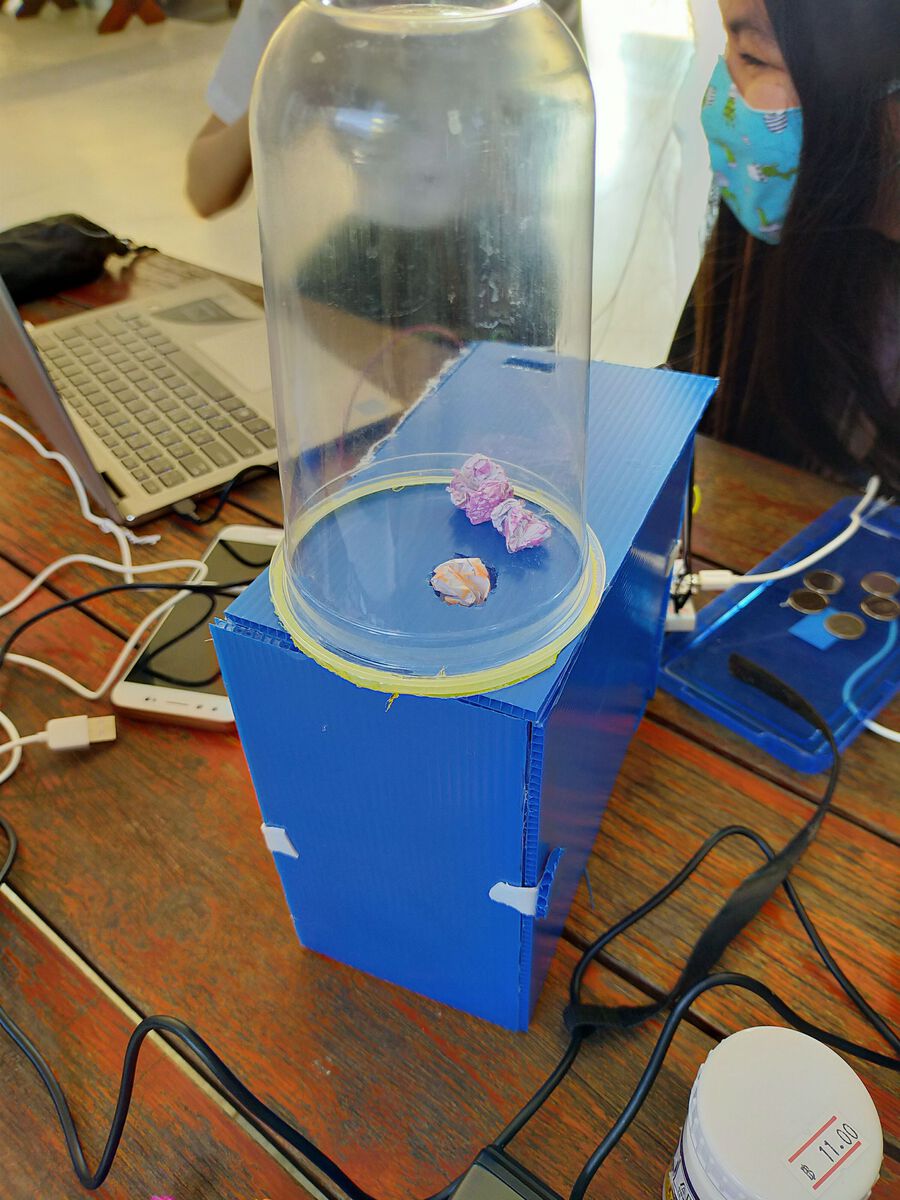
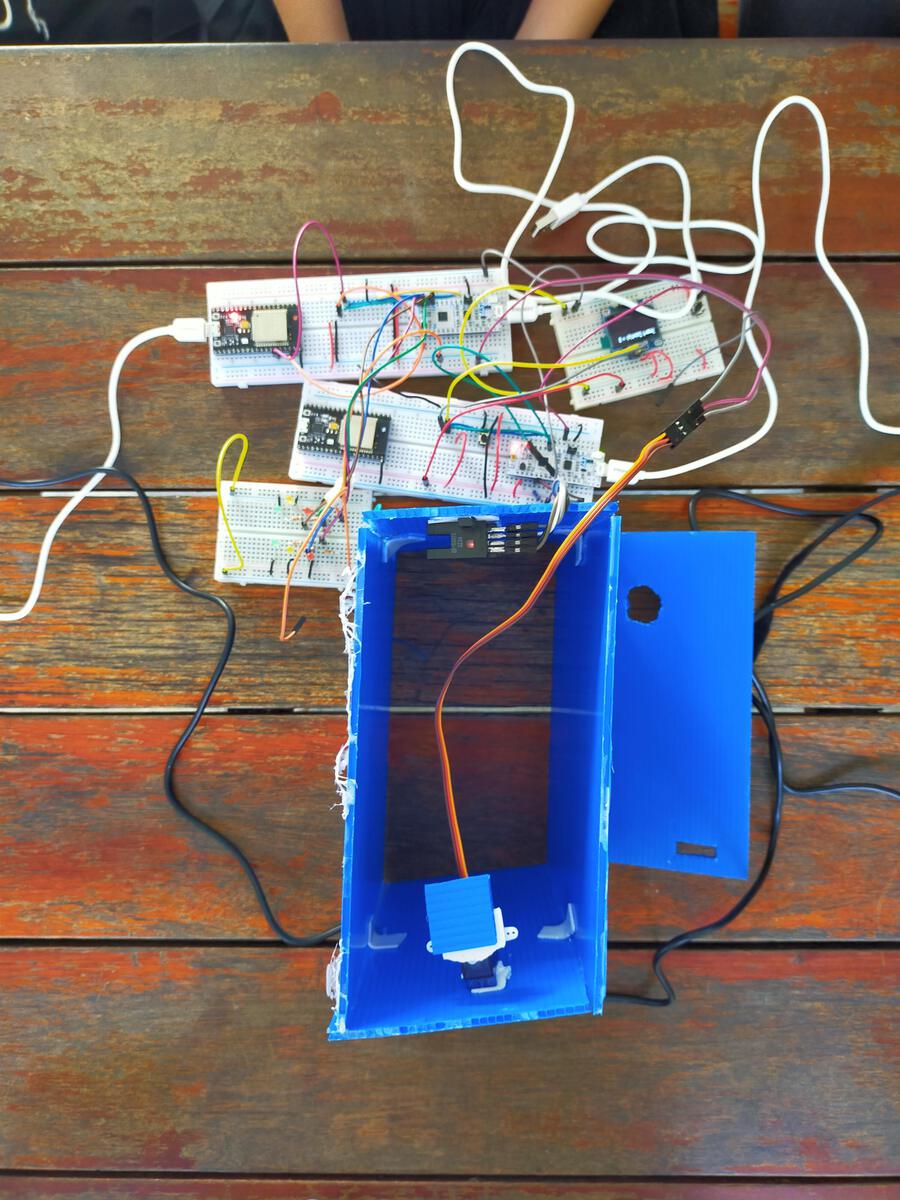
บ่อยครั้งที่เจ้าของสัตว์เลี้ยงต่างๆต้องออกไปข้างนอก ไม่ว่าจะเรื่องงานหรือเที่ยว ด้วยเหตุผลนั้นจึงอาจทำให้สัตว์เลี้ยงของคุณเกิดความเหงา ร้อน หรือหิว ที่อาจจะมีผลต่อสุขภาพของสัตว์เลี้ยงของคุณ จึงได้เกิดโปรเจคนี้ขี้นมาซึ่งก็คือ โปรเจกต์ที่จะทำให้สัตว์เลี้ยงของผู้ใช้ไม่เหงา แม้เจ้าของจะไม่อยู่บ้าน โดยมีฟีเจอร์ต่าง ๆ สำหรับรองรับการดูแลสัตว์เลี้ยงจากระยะไกล รวมถึงแจ้งเตือนผู้ใช้งานเกี่ยวกับข้อมูลปัจจุบันของเหล่าสัตว์เลี้ยง
🚀 Features
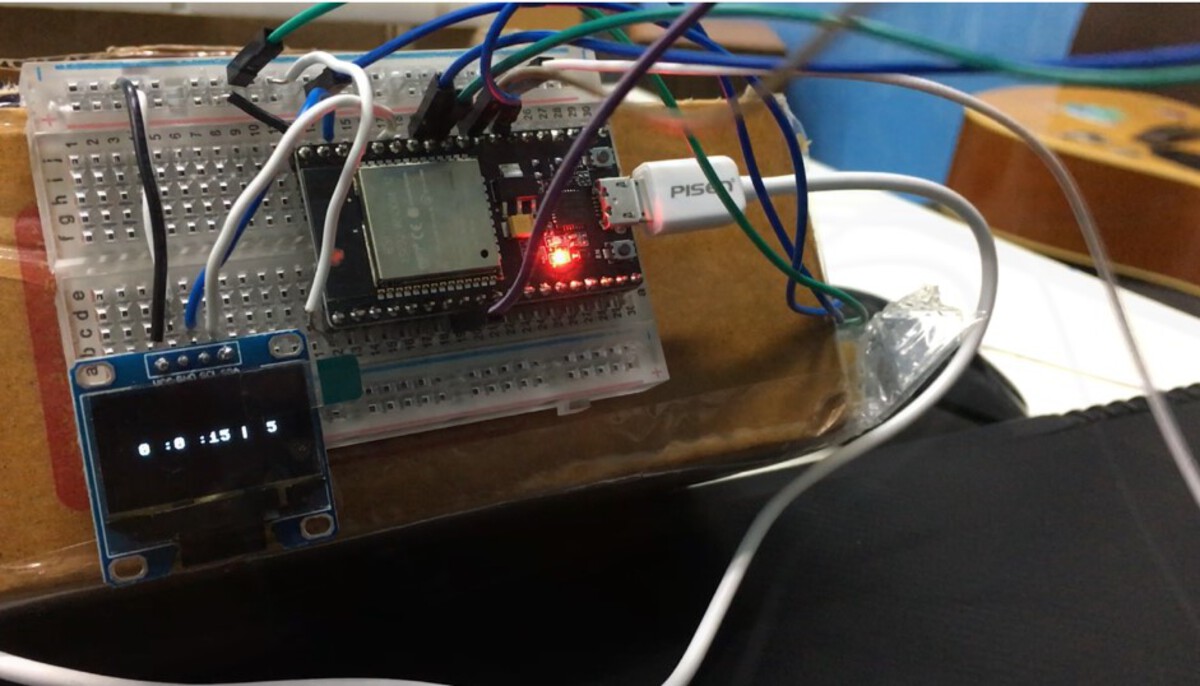
+ Temperature Measure & Air Conditioner Controller : ปลอกคอที่จะทำการวัดอุณหภูมิและส่งข้อมูลไปบนเว็บเพื่อแสดงผลให้กับผู้ใช้แบบ Realtime โดยเมื่ออุณหภูมิรอบกายสัตว์เลี้ยงสูงเกินไป จะมีการแจ้งเตือนไปยังผู้ใช้ และผู้ใช้สั่งเปิดหรือปิดเครื่องปรับอากาศแบบ Manual
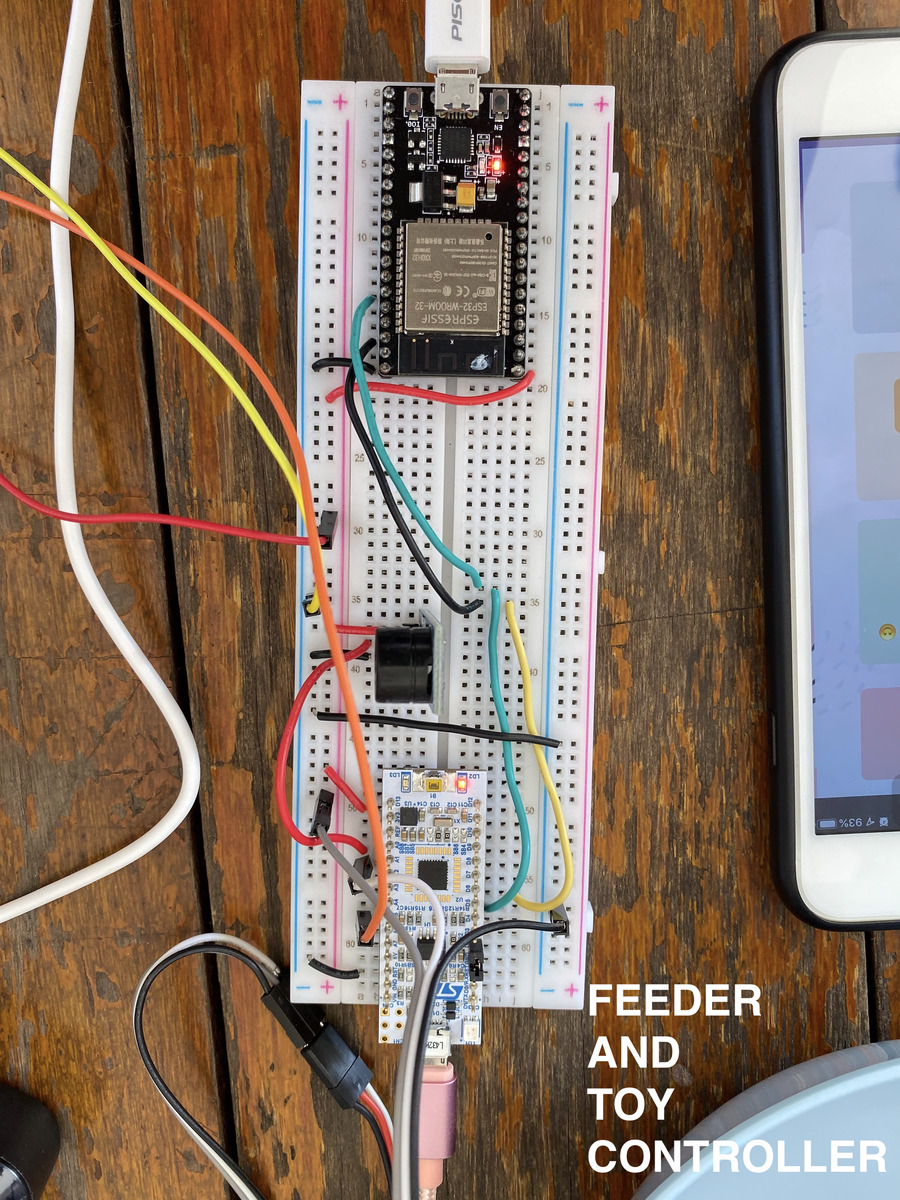
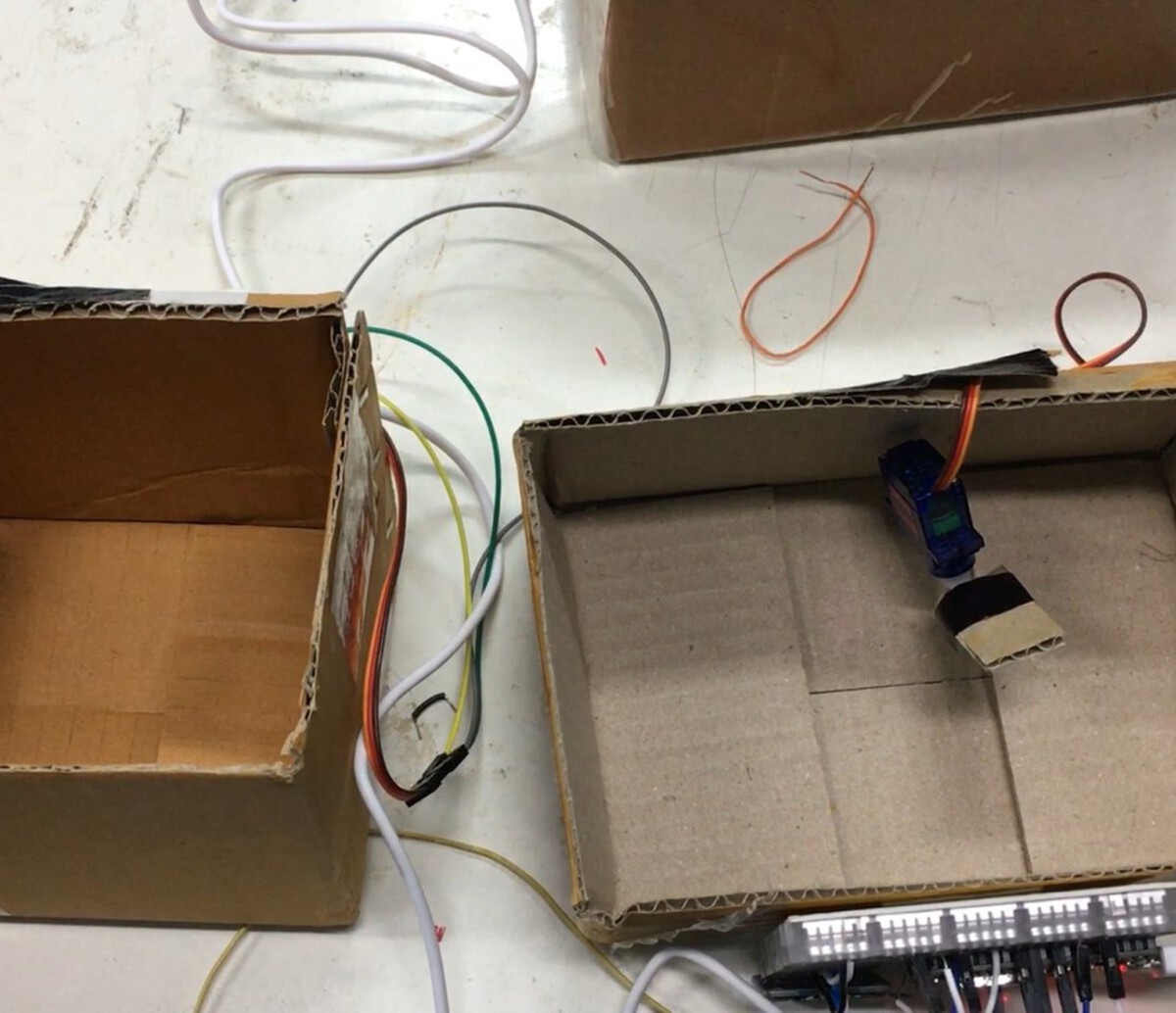
+ Feeder : อุปกรณ์ให้อาหารสัตว์เลี้ยง สามารถควบคุมผ่านเว็บเพื่อสั่งเติมอาหาร หลังจากนั้นอุปกรณ์จะทำการเทอาหารให้สัตว์เลี้ยงและหยุดทำงานเองโดยอัตโนมัติ
+ Toy Controller : ของเล่นสำหรับสัตว์เลี้ยงที่สามารถควบคุมผ่าน Controller บนเว็บ เพื่อสร้างความบันเทิงและความสนุกสนานให้กับสัตว์เลี้ยง เมื่อผู้ใช้สามารถสั่งเปิดการใช้งานของเล่น อุปกรณ์จะทำการแกว่งของเล่นและหยุดเองอัตโนมัติ
⚙️อุปกรณ์
+ ESP32-WROOM-32 จำนวน 3
+ STM32 NUCLEO-L432KC จำนวน 1
+ Passive Buzzer จำนวน 1
+ Servo จำนวน 2
+ LED ( แทนเครื่องปรับอากาศ ) จำนวน 1
+ Thermistor จำนวน 1
📲 เว็บสำหรับผู้ใช้ https://watchpet-322.web.app/
🔍 การทำงาน
+ Temperature Measure : ในการวัดอุณหภูมิจะทำการใช้บอร์ด ESP32 ต่อกับ Thermistor เพื่อใช้วัดอุณหภูมิ โดย ESP32 จะทำการต่อ Wifi เพื่อส่งค่าที่ได้ไปยัง Realtime Database จากนั้น เว็บจึงจะนำข้อมูลมาแสดง
+ Air Conditioner Controller : เมื่อผู้ใช้กดเปิดหรือปิดเครื่องปรับอากาศ เว็บจะส่งข้อมูลไปยัง Realtime Database และ ESP32 ที่ต่อ Wifi อยู่และต่อกับ LED ( ที่ใช้แทนเครื่องปรับอากาศ ) จะทำการดึงข้อมูลมายังบอร์ดและใช้ค่านั้นในการสั่งเปิดหรือปิด LED
+ Feeder & Toy Controller : ใช้บอร์ด ESP32 ต่อกับ STM32 โดย STM32 จะเชื่อมกับ Servo และ Buzzer ที่ใช้กับฟีเจอร์ Feeder และเชื่อมกับ Servo ที่ใช้กับฟีเจอร์ Toy Controller เมื่อผู้ใช้กดปุ่มเติมอาหารหรือเล่นกับสัตว์เลี้ยง เว็บจะส่งค่าขึ้นไปยัง Realtime Database และบอร์ด ESP32 ที่ต่อกับ Wifi จะดึงข้อมูลลงมา หลังจากนั้น ESP32 จะส่งข้อมูลไปยัง STM32 เมื่อ Feeder ทำงาน Servo จะหมุนทำให้อาหารตกลงมาในจาน และเมื่อเวลาผ่านไป 5 วินาที Servo จะหมุนปิด ส่วน Toy Controller เมื่อทำงานจะทำการสุ่มค่าเพื่อให้ Servo หมุนไปตามระยะที่ถูกสุ่ม และจะหยุดทำงานเมื่อผ่านไประยะเวลาหนึ่ง
💻 ข้อมูลทางเทคนิค
+ ใช้ Thonny สำหรับการเขียน Micropython ลงบน ESP32
+ ใช้ Mbed สำหรับเขียน C++ ลงบน STM32
+ สื่อสารระหว่าง ESP32 และ STM32 ผ่าน I2C
+ ใช้ Realtime Database บน Firebase เพื่อให้สามารถควบคุมอุปกรณ์ได้จากระยะไกล




นายธีธัช วระโพธิ์
นายสิรณัฎฐ์ รวมศิลป์
นางสาวจิตรลดา สุวรรณอิ่มสกุล
นายภูริวุทธ์ สันตสว่าง
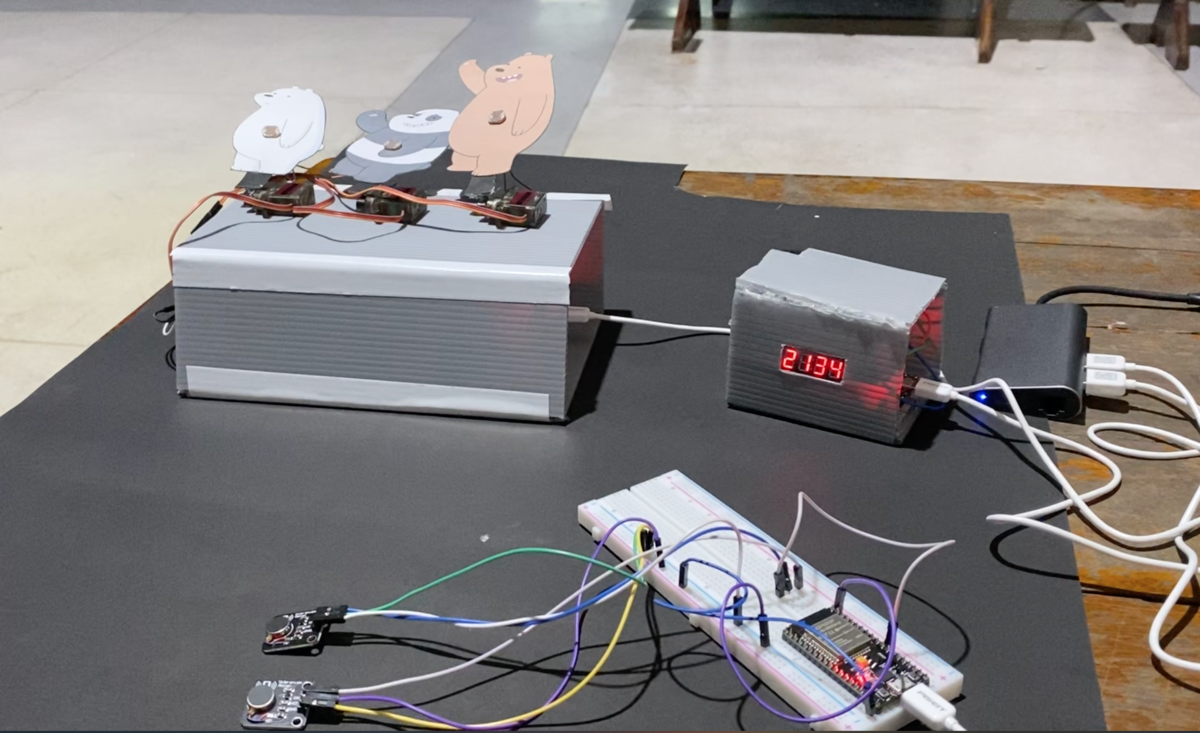
SMART CAGES เป็นกรงอัฉริยะที่ช่วยให้ผู้ใช้สามารถตั้งเวลาเพื่อให้อาหารแก่สัตว์เลี้ยงแบบอัตโนมัติได้ และคอยวัดอุณหภูมิอยู่เสมอเพื่อสั่งการพัดลมให้ทำงาน เมื่อกรงมีอุณหภูมิที่สูงเกินไป
♣Feature:
- Temperature sensor (IC DS18B20): ไว้วัดอุณหภูมิของสัตว์เลี้ยงว่า เพื่อปรับอุณหภูมิให้เหมาะสม
- Timer: ไว้ใช้ในการติดเวลาเพื่อให้อาหารสัตว์เลี้ยงให้เปิดเวลา
- Time/Date : แสดงว่าวันเวลาปัจจุบัน
♦อุปกรณ์:
- ESP32-WROOM-32 จำนวน 4
- OLED จำนวน 3
- IC DS18B20 จำนวน 1
- Button จำนวน 4
- Servo จำนวน 2
♥การทำงาน:
- เราจะเซต Timer ก่อน เพื่อระบุเวลาให้อาหารส่งเลี้ยงจะได้ตรงต่อเวลาที่เหมาะสม เมื่อ Timer ทำงานคนสิ้นสุดจะเปิด Servo ที่เป็นที่บรรจุอาหารเอาไว้เพื่อให้ส่งอาหารและเปิด ตามเวลาที่เราได้เซตเอาไว้แล้ว
- Temperature Sensor นั้นจะเปิดไว้ตลอดเวลาเพื่อเช็คอุณหภูมิที่เปลี่ยนไป และให้ปรับอุณหภูมิให้เหมาะสมกับสัตว์เลี้ยง
♠Technique:
- Thonny ในการเขียน Micropython ทั้ง 4 บอร์ด
- ผู้เลี้ยงสามารถตั้งค่า Time ได้ตามเวลาที่ต้องการในแต่ละวัน ผ่าน Button ที่เตรียมเอาไว้
- Esp32 คุยผ่านกันและกันได้ เพื่อสั่งการให้ servo เปิด/ปิด ในการให้อาหารพร้อมๆกัน


นางสาวณัฐพัชร์ วัฒนชาญสิทธิ์
นางสาวปวีณรัตน์ ธีรตาพงศ์
นางสาวศรุดา สมจิตรมูล
นางสาวสริตา พุฒิทานันท์
* ที่มาและรายละเอียดโครงงาน
โครงงานของกลุ่มเราได้ไอเดียมาจากตู้กาชาปองของญี่ปุ่น เนื่องจากสถานการณ์ความเครียดจากโรคระบาด พวกเราจึงมีไอเดียที่จะทำตู้กาชาปองเสี่่ยงดวง เพื่อหวังว่าจะช่วยบรรเทาความทุกข์ใจของทุกคนได้
โดยเพียงแค่ยอดเหรียญบาทห้าเหรียญ กดปุ่มสวิทซ์และอธิฐาน ก็สามารถลุ้นดวงของคุณได้ หวังว่าทุกคนจะได้ดวงที่ดี และมีความสุขกับกาชาปองของเรา
* ฟีเจอร์ของโครงงาน
~ ที่หยอดเหรียญที่สามารถนับเหรียญได้ว่าหยอดมาแล้วกี่เหรียญด้วย SPEED COUNTER SENSOR
~ โดยจะแสดงผลผ่าน จอ OLED ถ้าหยอดเหรียญไม่ครบสวิทซ์จะไม่สามารถทำงานได้
~ เมื่อกดสวิทซ์จะมีไฟ LED ขึ้นสลับกันเพื่อให้ลุ้นและอธิฐาน
~ จากนั้น SERVO จะทำการหมุนเปิดช่อง ให้กาชาปองที่มาพร้อมกับดวงของคุณโผล่ออกมา
* อุปกรณ์
~ STM32 NUCLEO-L432KC 2 boards
~ ESP32-WROOM-32 2 boards
~ SPEED COUNTER SENSOR 1 sensor
~ SERVO 1 sensor
~ OLED (SSD 1306) 1 senser
~ SWITCH 1 switch
~ LED 4 leds
~ RESISTOR 4 resistors
* เทคนิคที่ใช้
- การทำงาน -
~ การควบคุมของ STM32 NUCLEO-L432KC ตัวแรก ทำการรับค่าจาก SPEED COUNTER SENSOR เพื่อส่งข้อมูลไปแสดงผลบนจอ OLED (SSD 1306) และสวิทซ์
~ เมื่อกดสวิทซ์ STM32 NUCLEO-L432KC จะส่งข้อมูลไปยัง ESP32-WROOM-32 ผ่านการเชื่อมต่อแบบ I2C
~ ESP32-WROOM-32 ก็จะส่งข้อมูลต่อให้กับ ESP32-WROOM-32 อีกตัว แบบการเชื่อมต่อไร้สาย ด้วย ESP-Now เพื่อสามารถรองรับการกดสวิทซ์ระยะไกลได้
~ ESP32-WROOM-32 ก็จะส่งข้อมูลให้ STM32 NUCLEO-L432KC อีกตัว ผ่านการเชื่อมต่อแบบ I2C เพื่อที่จะสั่งการให้ ไฟ LED ทั้งสี่ดวง และ SERVO ทำงาน
- การโปรแกรม -
~ ใช้ Mbed สำหรับเขียน ภาษา C ลงบน STM32NUCLEO-L432KC เพื่อสั่งการเซนเซอร์และสื่อสารกับ ESP32-WROOM-32
~ ใช้ ARDUINO IDE สำหรับเขียน ภาษา C ลงบน ESP32-WROOM-32 (ได้มีการลองใช้ Thonny สำหรับการเขียน Micropython แต่ไม่ได้ใช้ในผลงานสำเร็จ)
---------------------------------------------------------------------------------------
* Inspiration and project details
Our group project got an idea from a Japanese GASHAPON. Due to stress from epidemic (COVID-19) situations We have the idea of making a Fortune-Gashapon machine. In the hope that it can help ease the suffering of everyone
By just the push five baht coins. Press the switch button and pray. Can hope for your luck. Hope everyone has a good fortune. And enjoying our Gashapon!!
* Project features
~ Vending machines that can count how many coins have been used with SPEED COUNTER SENSOR.
~ It will display on the OLED screen. If the coin is not complete, the switch will not work.
~ When pressing the switch, there will be LED lights alternately to give hope and pray.
~ After that, SERVO will rotate to open channel. Let the Gashapon that comes with your fortune come out.
* Equipment
~ STM32 NUCLEO-L432KC 2 boards
~ ESP32-WROOM-32 2 boards
~ SPEED COUNTER SENSOR 1 sensor
~ SERVO 1 sensor
~ OLED (SSD 1306) 1 senser
~ SWITCH 1 switch
~ LED 4 leds
~ RESISTOR 4 resistors
* Techniques used
- Operation -
~ The first control of the STM32 NUCLEO-L432KC receives the value from the SPEED COUNTER SENSOR to send the data to display on the OLED screen (SSD 1306) and the switch.
~ When pressing the switch STM32 NUCLEO-L432KC will send information to ESP32-WROOM-32 via I2C connection.
~ ESP32-WROOM-32 will forward the information to The ESP32-WROOM-32 is another wireless connection model with ESP-Now to support remote switch operation.
~ ESP32-WROOM-32 It will send data to another STM32 NUCLEO-L432KC via I2C connection in order to command all four LEDs and SERVO to work.
- Programming -
~ Use Mbed to write C language on STM32NUCLEO-L432KC. To command sensors and communicate with ESP32-WROOM-32
~ Use ARDUINO IDE for writing C language on ESP32-WROOM-32. (Have tried using Thonny for writing Micropython but not used in the work successfully)


ที่มา
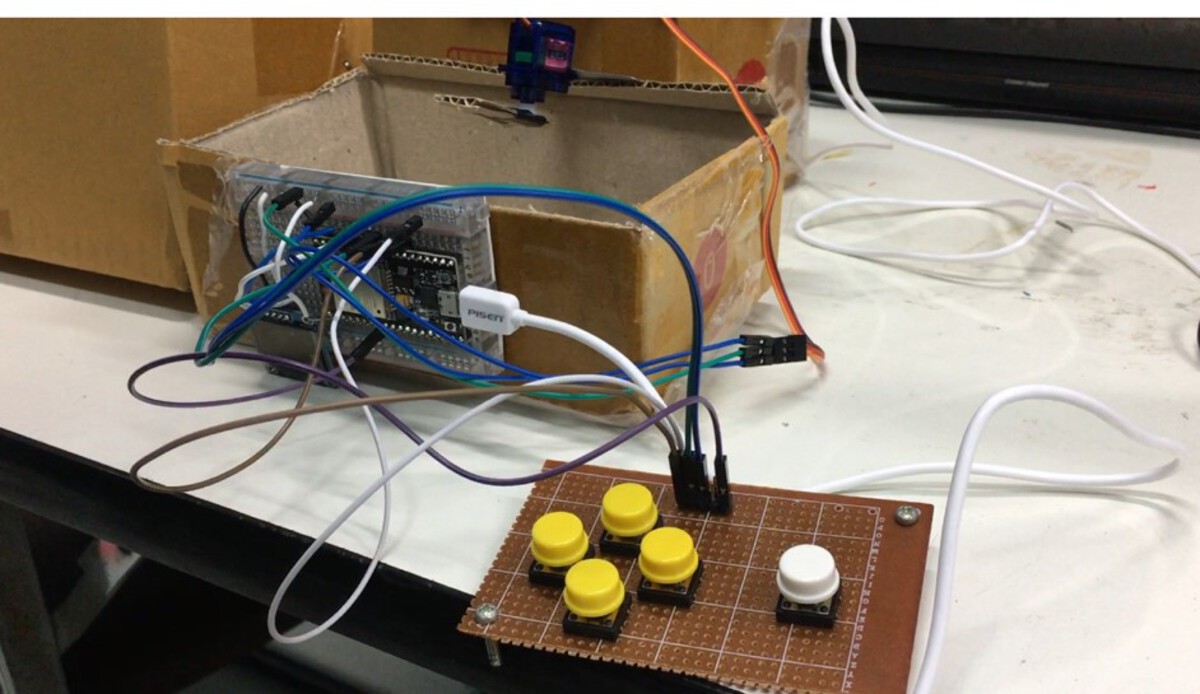
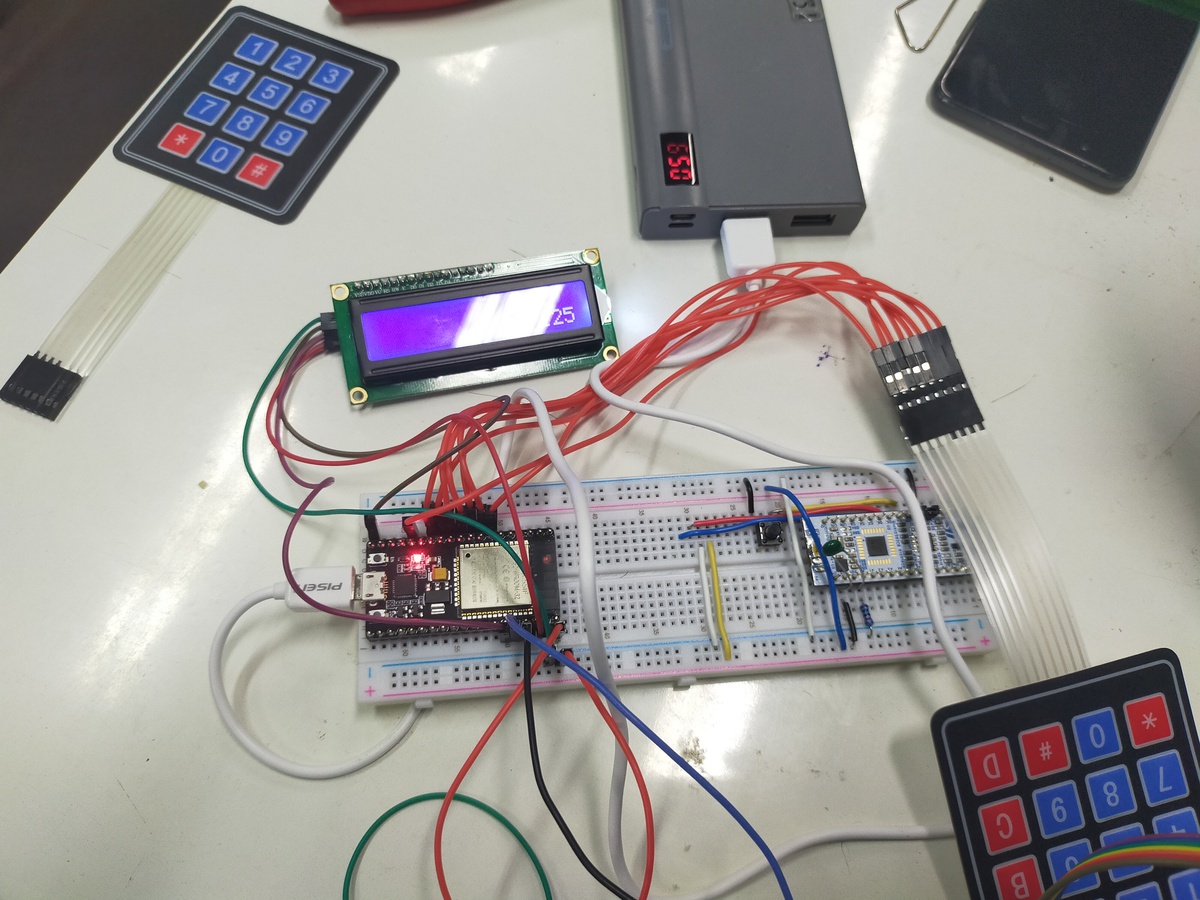
เกมบวกเลข ที่สะดวกต่อการพกพาเพื่อให้ทุกคนได้ลับสมองอยู่ตลอดเวลา และต่อยอดจากวิชา Practicum โดยไม่มีการพึ่งพาคอมพิวเตอร์อีกต่อไป เล่นได้ทางหน้าจอ OLED ได้เลย เมื่อมี power bank
ฟีเจอร์
-มีหน้าจอและKey pad 2 ชุด
-ฝั่ง key pad 4x4 นั้นเป็นฝ่ายที่ตั้งโจทย์
-ฝั่ง key pad 3x3 เป็นฝ่ายส่งตำตอบ
เทคนิค
-ทั้ง 2 MCU ใช้ adurino ในการเขียน
-การทำงานที่เกิดขึ้น ใช้จากฟั่งชั่นใน library ทั้งสิ้น
อุปกรณ์
-2 NodeMCU32-S
-OLED
- key pad 4x4
- key pad 3x3
- LCD display [16x2]


นายอนาวิล วงศ์สดิษฐ์
นายชานน พนมรัตนรักษ์
นายธนากร ปรางค์ศรีอรุณ
นายฌานณโชตน์ บุญเขียว
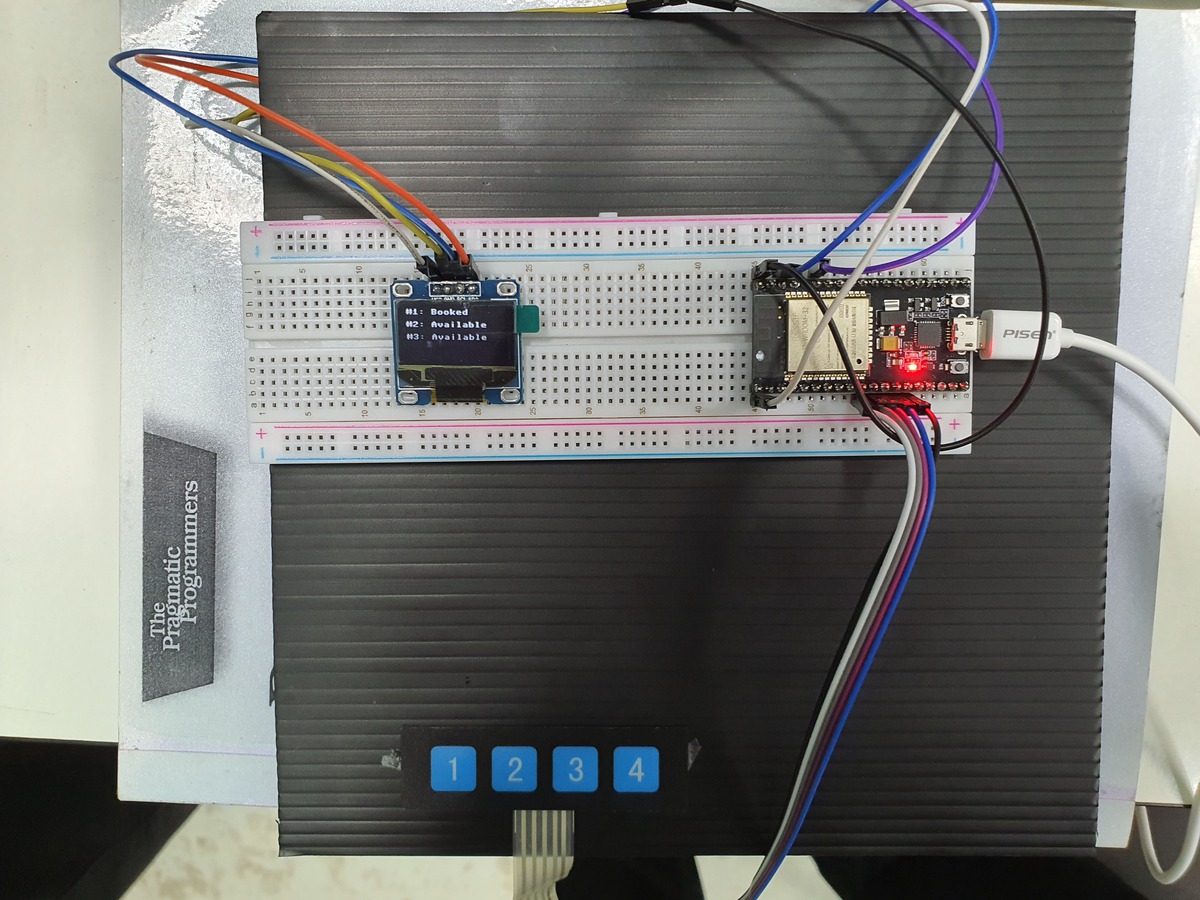
เนื่องจากเราต้องการศึกษาการสื่อสารระหว่างอุปกรณ์ที่เกิดขึ้นพร้อมกันหลายอุปกรณ์ และแต่ละอุปกรณ์มีทั้งการรับและส่งข้อมูล
เราจึงตัดสินใจเลือกจำลอง "ระบบล็อกเกอร์อัจฉริยะ" (ระบบล็อกเกอร์ในที่สาธารณะ) ซึ่งเป็นหนึ่งในระบบที่มีลักษณะการทำงานดังกล่าวขึ้นมา
กล่าวคือตู้ล็อกเกอร์ต้องคอยรับข้อมูลจากส่วนกลางว่าจะเข้าสู่โหมดการจองเมื่อใด ขณะเดียวกันก็ต้องส่งสถานะกลับไปส่วนกลางว่าตู้ล็อกเกอร์นั้นว่างแล้วหรือไม่
ฟีเจอร์:
- มีส่วนกลางสำหรับตรวจสอบสถานะทุกตู้ล็อกเกอร์ในระบบ และเป็นจุดเลือกตู้ล็อกเกอร์ที่จะเริ่มใช้งาน
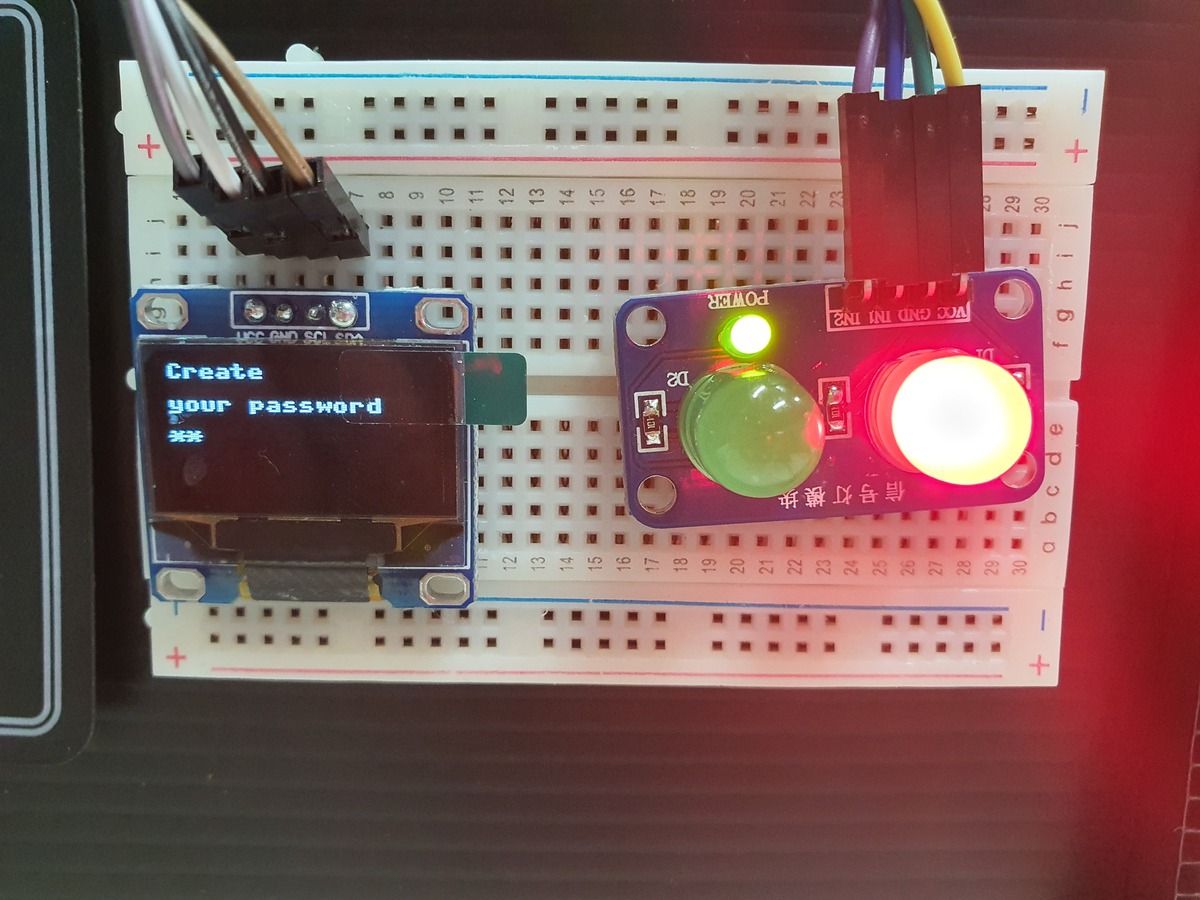
- ล็อกและปลดล็อกด้วยรหัสผ่านตัวเลข 4 หลักซึ่งตั้งโดยผู้ใช้งานขณะเริ่มใช้งาน
- มีไฟสถานะประจำตู้ล็อกเกอร์ (สีแดง: ไม่ว่าง สีเขียว: ว่าง)
เทคนิค:
- ส่วนกลางและตู้ล็อกเกอร์ทำงานโดยใช้บอร์ด ESP32 ซึ่งติดตั้งสคริปต์และเฟิร์มแวร์ MicroPython
- ใช้โปรโตคอล ESP-Now เชื่อมต่อและส่งข้อมูลค่าสถานะตู้ล็อกเกอร์ระหว่างบอร์ด ESP32 แต่ละตัว
- ติดตั้ง OLED ขนาด 128x64 เพื่อเป็นจอแสดงผล โดยรับคำสั่งจากบอร์ดผ่าน I²C
- ติดตั้ง Keypad ที่ตู้ล็อกเกอร์เพื่อรับข้อมูลนำเข้าเป็นรหัสผ่าน โดยประมวลผลตัวเลขที่กดจากสัญญาณนำเข้าที่เป็นแถว-หลัก (แมตริกซ์)
ด้วยไลบรารี Keypad ที่ถูกพอร์ตขึ้นใหม่จาก Mbed OS มายัง MicroPython
- ติดตั้ง Servo เพื่อทำหน้าที่เป็นตัวล็อก/ปลดล็อกประตูล็อกเกอร์ โดยใช้ PWM ควบคุมองศาการหมุน
- ติดตั้ง Buzzer Speaker เพื่อทำหน้าที่ส่งเสียงตอบรับการกดปุ่มของผู้ใช้ โดยใช้ PWM ควบคุมรูปแบบเสียงที่ออกมา
- ใช้เธรด (thread) เพื่อทำให้หลาย ๆ งานภายในแต่ละบอร์ดนั้นดำเนินไปพร้อมกันได้
อุปกรณ์:
4 x NodeMCU32-S, 4 x 4-pin White I2C OLED 128x64 (SSD1306), 3 x MG90S Micro Servo,
3 x Passive Buzzer Speaker 3-5V, 3 x 2-color LED Module - Green & Red 10mm,
3 x Membrane Keypad Switch 1x4, 1 x Membrane Keypad Matrix Switch 4x3


นายประกฤษฎิ์ กนกพงศกร
นายคุณานนต์ จันคะณะสุข
นายธนกฤต น้าประเสริฐ
นายวชิรวิทย์ เวชรักษ์
วิธีการควบคุมและบังคับรถโดยใช้การขยับมือทั้ง 2 ข้าง แทนการใช้จอยสติ๊ก มีหลักการทำงานคร่าว ๆ คือ มือข้างซ้ายใช้การเอียงมือเพื่อควบคุมการเลี้ยวของรถ เมื่อต้องการให้รถเลี้ยวซ้ายต้องเอียงมือไปทางซ้าย และเมื่อต้องการให้รถเลี้ยวขวาต้องเอียงมือไปทางขวา ขณะที่มือข้างขวาใช้การกำและแบมือเพื่อควบคุมการเคลื่อนที่ของรถ เมื่อต้องการให้รถเคลื่อนที่ต้องแบมือ และเมื่อต้องการให้รถหยุดเคลื่อนที่ต้องกำมือ
---------------------------------------------------------------------------------------
ที่มา:
ด้วยความที่ว่าในปัจจุบันนี้มีอุปกรณ์มากมายที่สามารถควบคุมให้เคลื่อนที่ผ่านระยะทางไกลได้ นั้นมีผู้ที่สนใจเกี่ยวกับมันมากขึ้น โดยที่อุปกรณ์เหล่านี้ส่วนใหญ่ก็จะเป็น โดรน รถบังคับ เรือบังคับ เป็นต้น ซึ่งด้วยระยะเวลาในการทำที่มีจำกัดนั้นเราจึงเลือกการทำรถบังคับขึ้นมา โดยที่วิชา Embedded System นั้นได้มีการกำหนดให้ใช้ 4 บอร์ดในการพัฒนาอุปกรณ์ให้เกิดการสื่อสารกัน เราจึงไปศึกษาอุปกรณ์เกี่ยวกับรถบังคับเพิ่ม ว่าส่วนไหนเราสามารถเพิ่มได้ ส่วนไหนที่เราเพิ่มไม่ได้ และส่วนไหนที่สามารถตัดทิ้งไปได้ สุดท้ายแล้วเราก็สรุปได้ว่าเราจะตัดจอยร์บังคับทิ้งไป และเปลี่ยนการบังคับรถไปเป็นอีกแบบหนึ่งแทนที่จะทำให้เวลาที่เราบังคับรถไปเราก็จะรู้สึกสนุกไปกับมันได้ด้วย โดยส่วนรถนั้นจะมีการติดตั้งอุปกรณ์เสริมรถเข้าไปอีกเพื่อให้อุปกรณ์ภายในรถนั้นสามารถที่จะสื่อสารกันเอง และเสริมสร้างความสามารถ ความปลอดภัยให้กับรถ
ฟีเจอร์:
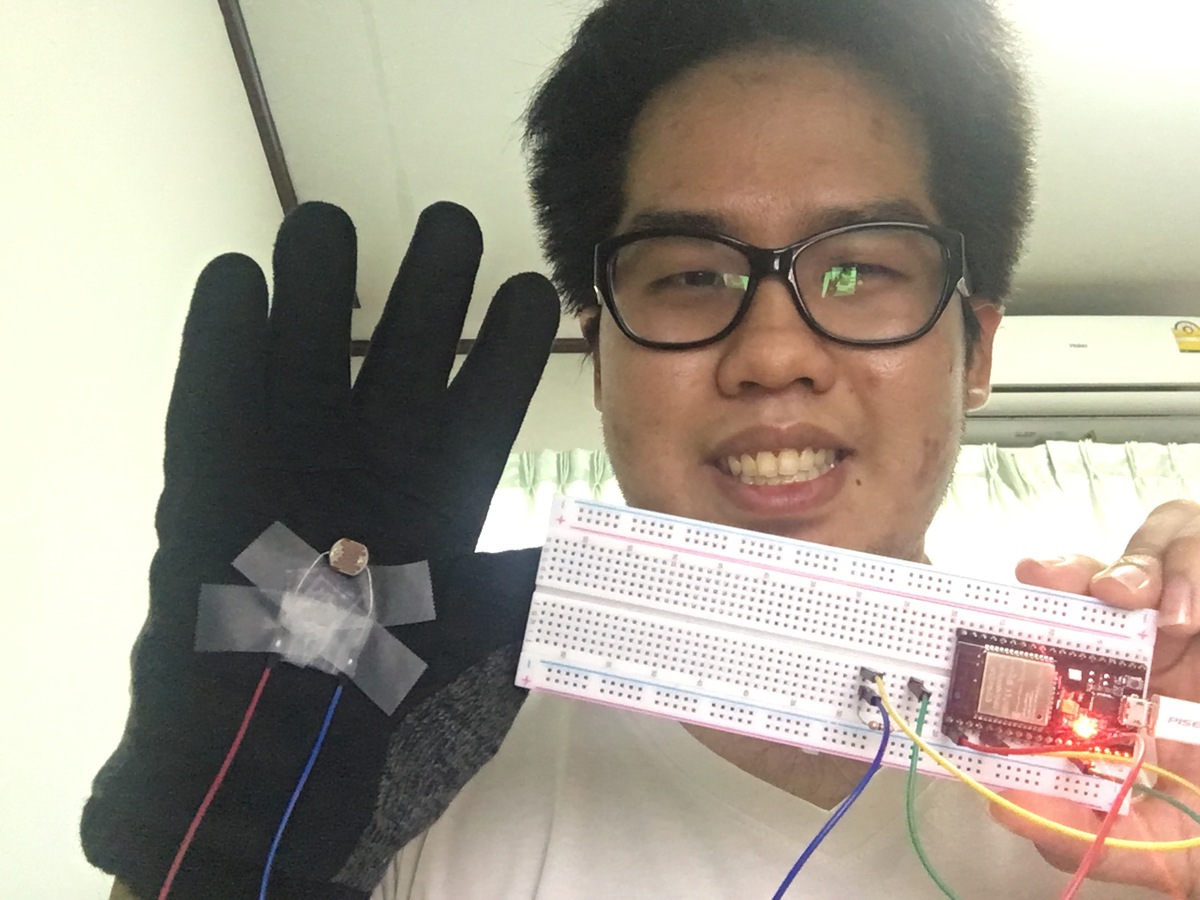
1. ใช้มือซ้ายควบคุมทิศทาง โดยตัวเซนเซอร์วัดความเอียงสามมิติบนถุงมือ ถ้าเอียงมือไปทางซ้ายรถก็จะไปทางซ้าย แล้วถ้าเอียงขวารถก็จะเลี้ยวซ้าย
2. เร่งและหยุดรถโดย แบมือและหุบมือขวา การควบคุมจะถูกตรวจจับโดยเซนเซอร์จับแสงบนมือขวา
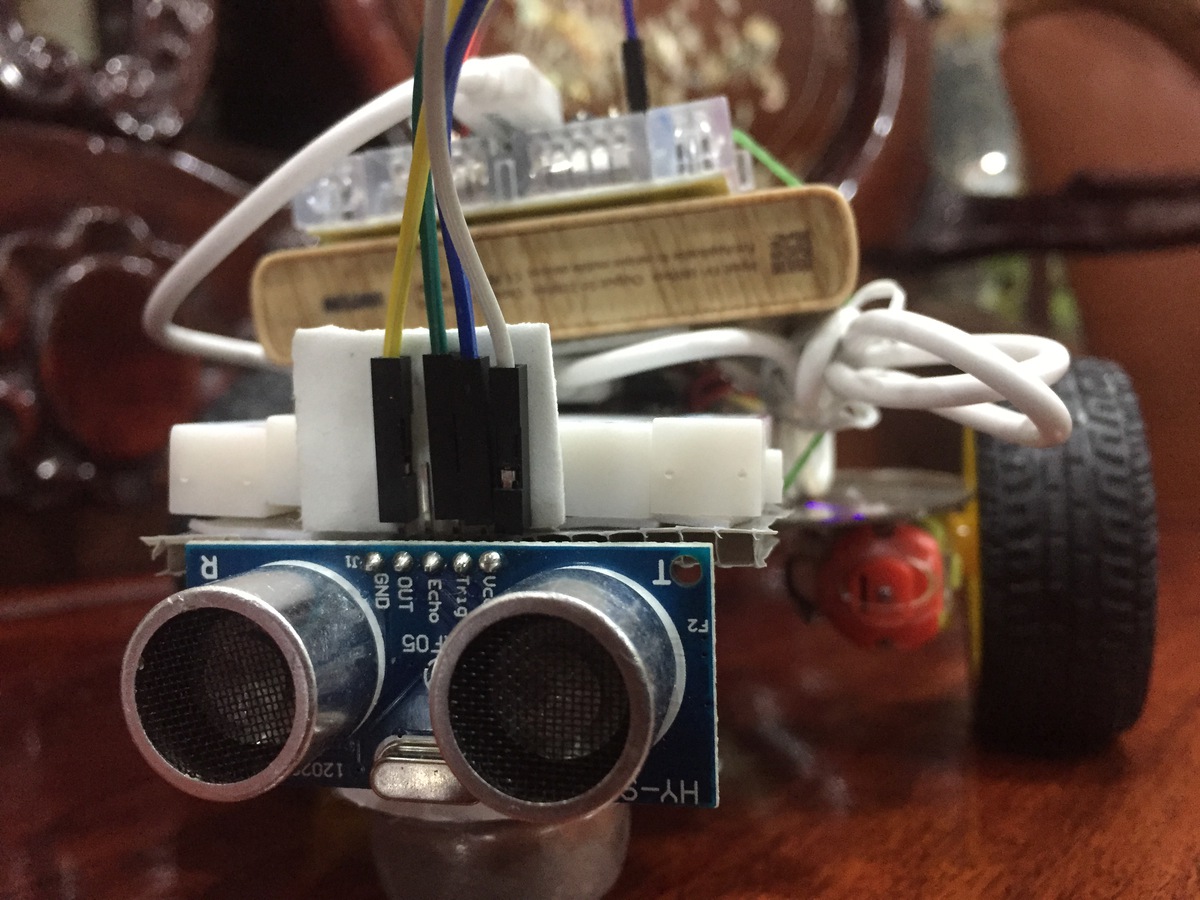
3. รถจะสามารถหยุดโดยอัตโนมัติเมื่อรถพบจับอุปสรรค ตัวอุปสรรคจะถูกตรวจจับโดยเซนเซอร์วัดระยะ ระบบหยุดทันทีเมื่ออุปสรรคอยู่ใกล้เกินไป
github: https://github.com/Tauhoo/Control-Car-With-Hands.git



นายชินวัชร์ ไชยเดช
นายศักดิธัช สุพตานนท์
นายอาทิตย์ โพธิ์ทอง
นายชนวรรฒ โลหะชาละ
แบบจำลองโรงจอดรถอัจฉริยะสำหรับห้างสรรพสินค้า โดยที่มีระบบการเข้าใช้งานโรงจอดรถและชำระเงินค่าจอดรถผ่านบัตรของห้างสรรพสินค้าโดยเฉพาะ
ที่มา :
โครงงานนี้ได้รับแรงบันดาลใจมาจากที่จอดรถตามห้างสรรพสินค้าต่างๆ ซึ่งกลุ่มของพวกเราได้มีความคิดว่าถ้าหากเราสามารถจัดการระบบต่างๆในโรงจอดรถ เช่น การเปิดปิดประตูกั้น การชำระเงิน ให้อยู่ในรูปแบบระบบอัตโนมัติทั้งหมดคงจะดีไม่น้อย กลุ่มของพวกเราจึงได้คิดและสร้างโครงงานแบบจำลองโรงจอดรถอัจฉริยะที่ขับเคลื่อนด้วยระบบฝังตัวนี้ขึ้นมา
ฟีเจอร์ :
- ระบบตรวจจับรถในแต่ละที่จอด
- ระบบแสดงสถานะของที่จอด(ว่าง/ไม่ว่าง)ผ่านสีหลอดไฟที่อยู่ตามที่จอดรถต่างๆ
- ระบบรายงานสถานะโรงจอดรถให้กับลูกค้าของห้างสรรพสินค้าผ่านจอที่หน้าโรงจอดรถ
- ระบบการตรวจจับบัตรของลูกค้าที่ประตูกั้น
- ระบบประตูกั้นอัตโนมัติ โดยที่ประตูกั้นฝั่งทางเข้าจะเปิดอัตโนมัติก็ต่อเมื่อลูกค้าได้ทำการแตะบัตรที่เซ็นเซอร์ตรงประตูกั้นและสถานะของโรงจอดรถยังมีที่ว่าง ส่วนประตูกั้นฝั่งทางออกจะเปิดก็ต่อเมื่อลูกค้าได้ชำระเงินค่าจอดรถผ่านการแตะบัตรที่เซ็นเซอร์ตรงประตูกั้น
- ระบบแสดงค่าจอดรถผ่านจอในโรงจอดรถ โดยเมื่อลูกค้าได้แตะบัตรตอนที่จะเข้าโรงรถ ระบบจะทำการบันทึกรหัสบัตรและเวลาที่บัตรเริ่มแตะตอนขาเข้า เมื่อลูกค้าจะชำระเงินผ่านการแตะบัตร ระบบจะเช็ครหัสบัตรและนำเวลาที่แตะบัตรตอนขาเข้ามาลบกับเวลาที่แตะบัตรตอนชำระเงิน แล้วนำไปคำนวนค่าจอดรถและแสดงค่าจอดรถผ่านจอในโรงจอดรถ
อุปกรณ์ :
- STM32 WROOM32 จำนวน 1 บอร์ด
- ESP32 Nucleo32 จำนวน 3 บอร์ด
- OLED with SSD1306 Driver จำนวน 2 อัน
- KY-016 RGB LED จำนวน 2 อัน
- SG90 Servo Motor จำนวน 2 อัน
- KY-022 Infrared Receiver จำนวน 1 อัน
- Micro Switch จำนวน 3 อัน
เทคนิคที่ใช้ :
ในโครงงานนี้ ได้ทำการแบ่งบอร์ดเป็น 4 บอร์ด ซึ่งแต่ละบอร์ดมีหน้าที่และเทคนิคที่ใช้ดังต่อไปนี้
1. บอร์ด A
- พัฒนาบนบอร์ด STM32 WROOM32 ด้วยภาษา C ผ่านแพลตฟอร์ม Mbed
- หน้าที่หลักคือรับผิดชอบในส่วนของการทำงานของระบบประตูกั้นอัตโนมัติ
- ใช้ SG90 Servo Motors จำลองการทำงานของประตูกั้นอัตโนมัติ
- รับข้อมูลจำนวนที่ว่างในโรงจอดรถจากบอร์ด B ผ่านการสื่อสารแบบ i2c
- รับข้อมูลการแจ้งเตือนว่ามีลูกค้ามาแตะบัตรตอนขาเข้าหรือชำระเงินจากบอร์ด C
- ส่งข้อมูลการแจ้งเตือนสถานะโรงจอดรถให้บอร์ด C
2. บอร์ด B
- พัฒนาบนบอร์ด ESP32 Nucleo32 ด้วยภาษา Python ผ่านแพลตฟอร์ม Thonny
- หน้าที่หลักคือรับผิดชอบในส่วนของการทำงานของระบบตรวจจับรถและแสดงสถานะในแต่ละที่จอด และระบบรายงานสถานะโรงจอดรถ
- ใช้ Micro Switch ในการตรวจจับรถที่เข้ามาจอด โดยในแบบจำลองได้ใช้ฟิวเจอร์บอร์ดเป็นพื้นที่จอดรถ และใช้ Micro Switch รองไว้ด้านล่าง เมื่อมีรถมาจอดตรงที่จอด หมายความว่ามีน้ำหนักมากดที่ฟิวเจอร์บอร์ดและ Micro Switch ไปด้วย
- ใช้จอ OLED ในการแสดงสถานะที่จอดรถ
- ส่งข้อมูลจำนวนที่ว่างในโรงจอดรถให้บอร์ด A ผ่านการสื่อสารแบบ i2c
3. บอร์ด C
- พัฒนาบนบอร์ด ESP32 Nucleo32 ด้วยภาษา C ผ่านแพลตฟอร์ม Arduino IDE
- หน้าที่หลักคือรับผิดชอบในส่วนของการทำงานของระบบแสดงค่าจอดรถผ่านจอในโรงจอดรถ และการตรวจจับการแตะบัตร
- ในแง่หลักการของระบบการตรวจจับบัตรนั้น เมื่อแตะบัตร บัตรจะส่งสัญญาณเป็นรหัสเฉพาะตัวของบัตรนั้นๆ แต่เนื่องจากปัญหาทางเทคนิค กลุ่มของเราจึงเลือกใช้ Infrared Receiver และ รีโมตเครื่องฟอกอากาศในการจำลองระบบตรวจจับบัตร โดยที่รีโมตเครื่องฟอกอากาศสามารถส่งสัญญาณอินฟราเรตได้ และปุ่มต่างๆในรีโมต ก็มีรหัสเฉพาะตัวซึ่งสามารถใช้จำลองแทนบัตรของลูกค้าแต่ละคนได้
- บันทึกข้อมูลเวลาที่เริ่มแตะบัตรลงใน Firebase และดึงข้อมูลค่าจอดรถจาก Firebase
- ใช้จอ OLED ในการแสดงค่าจอดรถ
- รับข้อมูลการแจ้งเตือนสถานะโรงจอดรถจากบอร์ด A
- ส่งข้อมูลการแจ้งเตือนว่ามีลูกค้ามาแตะบัตรตอนขาเข้าหรือชำระเงินให้บอร์ด A
4. บอร์ด D
- พัฒนาบนบอร์ด ESP32 Nucleo32 ด้วยภาษา C ผ่านแพลตฟอร์ม Arduino IDE
- หน้าที่หลักคือรับผิดชอบในส่วนของการนำข้อมูลจาก Firebase มาคำนวนค่าจอดรถ แล้วบันทึกลงใน Firebase

นายวรรธนัย สาธุพันธ์
นายธันยา ตันศรีประภาศิริ
นายอัฐพงศ์ สมบูรณ์วรากร
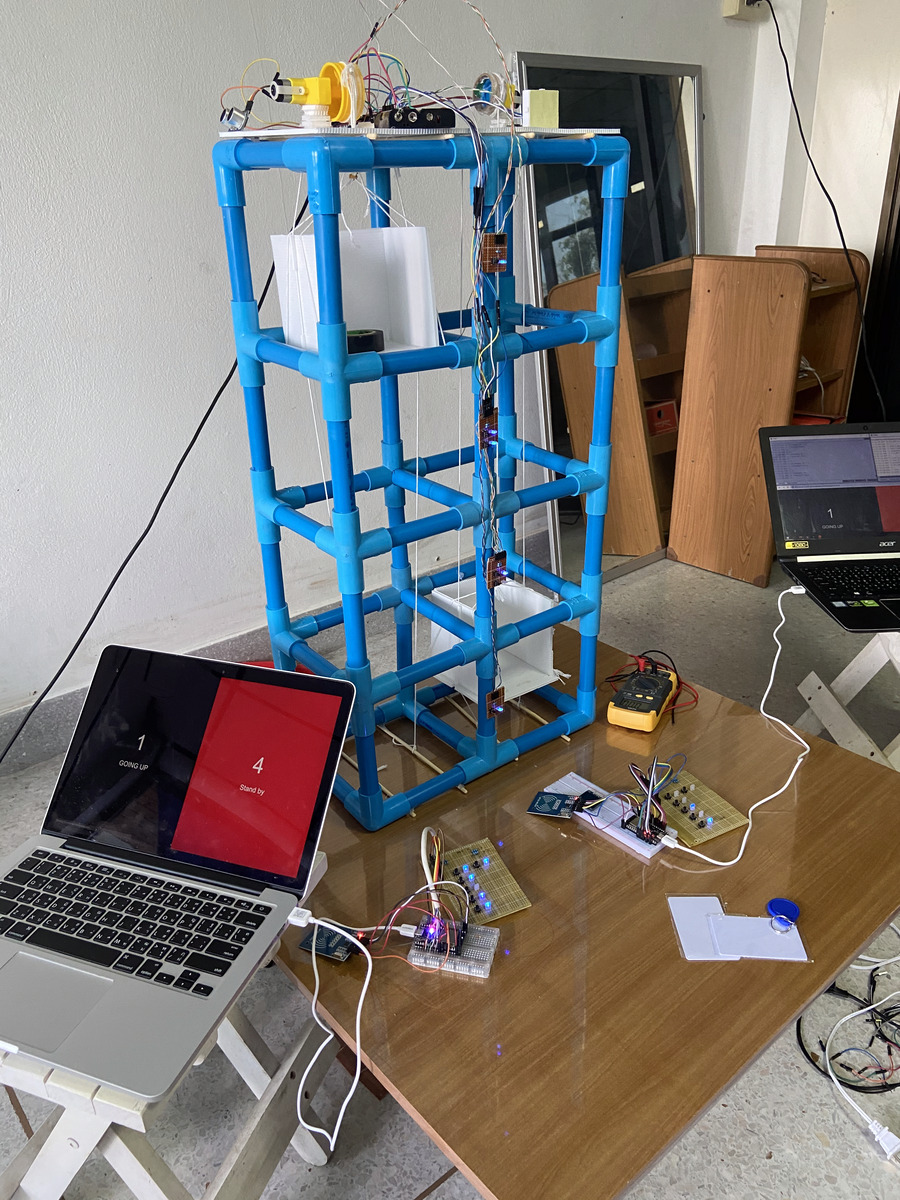
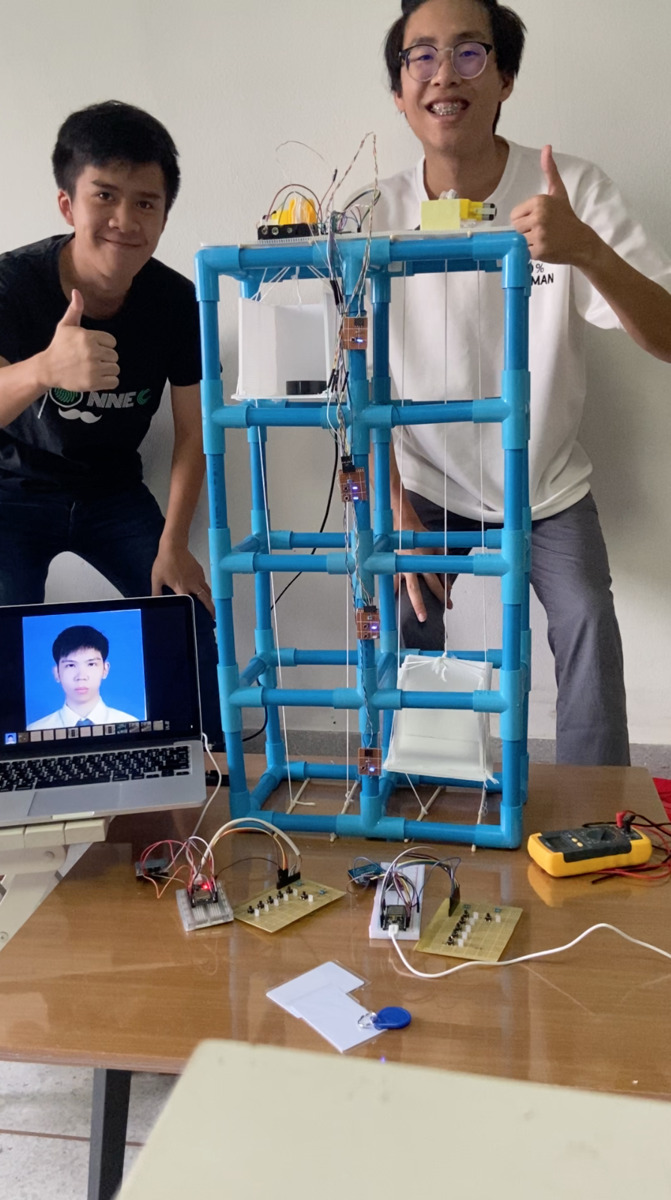
รายละเอียด:
ระบบจำลองลิฟต์โดยสาร ที่สามารถทำงานได้อย่างมีประสิทธิภาพ มีฟังก์ชันพื้นฐานที่ลิฟต์ทั่วไปมี เช่น การเปิดประตูให้นานขึ้น การกดชั้นเพิ่มระหว่างที่ลิฟต์ทำงาน ฯลฯ และยังมีฟังก์ชันพิเศษคือใช้ RFID ในการควบคุมและเก็บข้อมูลการใช้งานของผู้ใช้ โดยมีการเก็บข้อมูลสิทธิในการใช้งานลิฟต์ในฐานข้อมูล แล้วนำข้อมูลการใช้งานและสถานะต่างๆมาแสดงผลในหน้าจอสำหรับผู้ดูแล (Back Office) ทั้งนี้ระบบสามารถนำไปต่อยอดเพื่อใช้ประโยชน์อื่นได้เช่น การนำบางส่วนไปใช้งานจริงและนำข้อมูลที่ระบบเก็บได้มาใช้ในการออกแบบการจัดการลิฟต์โดยสารที่มีประสิทธิภาพมากขึ้นต่อไป
-------------------------------------------------------------
ที่มา:
จากความสนใจในการทำงานของลิฟต์โดยสารตามอาคารสถานที่ต่างๆ ซึ่งแต่ละที่มีการออกแบบและจัดการที่แตกต่างกันไป ทางผู้จัดทำจึงมีความคิดว่ายังมีส่วนไหนที่สามารถพัฒนาเพิ่มได้อีกหรือไม่ โดยมีจุดประสงค์เพื่อนำความรู้จากวิชา Embedded System มาประยุกต์ใช้กับความรู้วิชาอื่นๆในหลักสูตรวิศวกรรมคอมพิวเตอร์ทั้งนี้เพื่อเป็นการฝึกการบูรณาการความรู้และการแก้ปัญหาเฉพาะหน้าต่างๆที่จะพบระหว่างการจัดทำโครงงาน
-------------------------------------------------------------
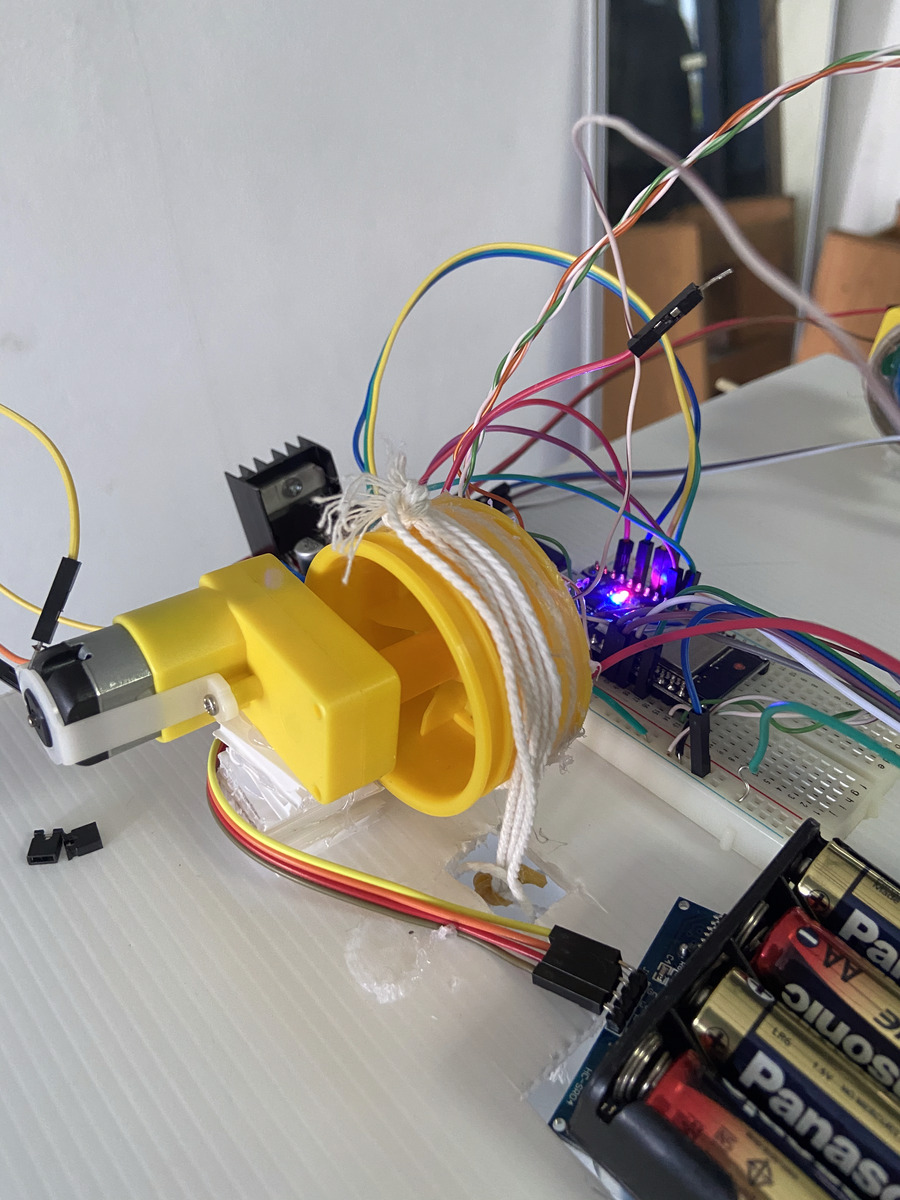
อุปกรณ์:
- NodeMCU ESP32-S จำนวน 3 ชิ้น
- RC522 RFID Card Reader จำนวน 2 ชิ้น
- SR04 Ultrasonic จำนวน 4 ชิ้น
- KY-006 Passive Buzzer จำนวน 1 ชิ้น
- LED จำนวน 18 ชิ้น
- Geared Motor 1:48 จำนวน 2 ชิ้น
- L298N Motor Driver จำนวน 1 ชิ้น
- Micro Switch จำนวน 18 ชิ้น
เทคนิคและเครื่องมือที่นำมาใช้:
ใช้บอร์ด ESP32 ที่ถูกพัฒนาด้วยภาษา C ในการควบคุมส่วนต่างๆตรงระบบลิฟต์ ทำหน้าที่รับคำสั่งและส่งข้อมูลต่างๆเข้าระบบส่วนกลาง โดยจะให้มีการสื่อสารกับส่วนกลางอย่างต่อเนื่องผ่าน Internet เพื่อให้บอร์ดต่างๆและตัวระบบทำงานอย่างสัมพันธ์กัน
การสื่อสารของระบบนั้นถูกพัฒนาโดยมีการทั้งเป้าหมายว่า จะเป็นการสื่อสารแบบไร้สายโดยสมบูรณ์เพื่อตัดข้อจำกัดเรื่องขนาดและความห่างกันของส่วนต่างๆในระบบหากมีการนำไปพัฒนาต่อไป นอกจากนี้การสื่อสารกันด้วย APIs ทีมผู้จัดฯพยายามพัฒนาให้เป็นไปตาม De facto standard ต่างๆ เพื่อให้ง่ายต่อการนำไปพัฒนาหรือนำบางส่วนออกไปใช้งานกับระบบงานอื่นต่อไป
ระบบกลาง (Server) ถูกพัฒนาด้วย Python โดยจะทำหน้าที่เชื่อมต่อฐานข้อมูล, รับข้อมูลจากส่วนต่างๆของระบบเพื่อนำมาจัดการลิฟต์, สนับสนุนการทำงานของบอร์ดต่างๆและเตรียมข้อมูลสำหรับหน้าเว็บ Back Office
ใช้ฐานข้อมูล PostgreSQL ในการเก็บข้อมูล โดยจะเก็บข้อมูลสมาชิก, บัตรสมาชิก, บันทึกการใช้งานของสมาชิก, บันทึกการทำงานของลิฟต์แต่ละตัว โดยข้อมูลเหล่านี้หากมีปริมาณมากพออาจนำไปวิเคราะห์เพิ่มพัฒนาวิธีการจัดการลิฟต์ต่อไปได้
สามารถทดลองใช้ Back Office ได้ที่ https://pckl-api.herokuapp.com/bof/
Git: https://github.com/WisTiCeJEnT/pom-chob-khun-lift